- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi! I got a problem when I was using realsense D435i camera.
I recorded only the generated point-cloud data and RGB image WITHOUT alignment.
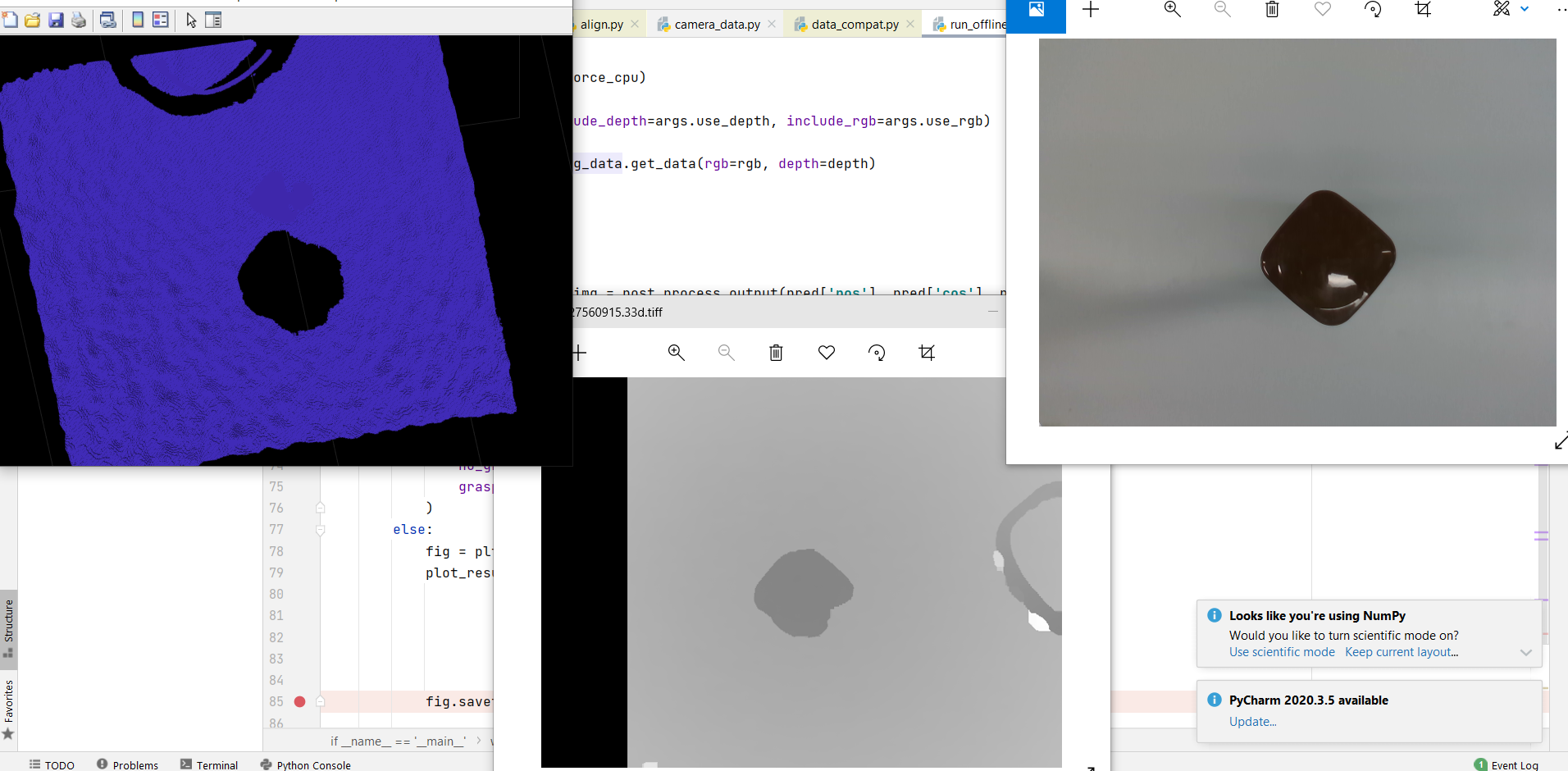
It turns out to be: my point-cloud data (or the depth image generated by point-cloud) has the same pixel number with RGB image, while the vision field is different. As shown in attached file, left is the point-cloud plotted, middle is the depth image generated by point-cloud, right is the RGB image.
I'm wondering is there any method that can align the point-cloud with RGB image from my stage. Since the method I can find on google is all about aligning using the RGB and depth frame, while I didn't save those frames.
Thanks anyone for help!!!!!!!!!!!
{kind=link}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello JLH,
Thank you for posting on the Intel® communities.
I would like to let you know that we have a specific forum for the Intel® RealSense™ issues and products. There you will receive the appropriate support on this and other concerns you may have related to this product.
Here you will find the links to access the website and the community forums:
- https://www.intelrealsense.com/
- https://support.intelrealsense.com/hc/en-us
Please keep in mind that this thread will no longer be monitored by Intel.
Regards,
Deivid A.
Intel Customer Support Technician
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page