- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
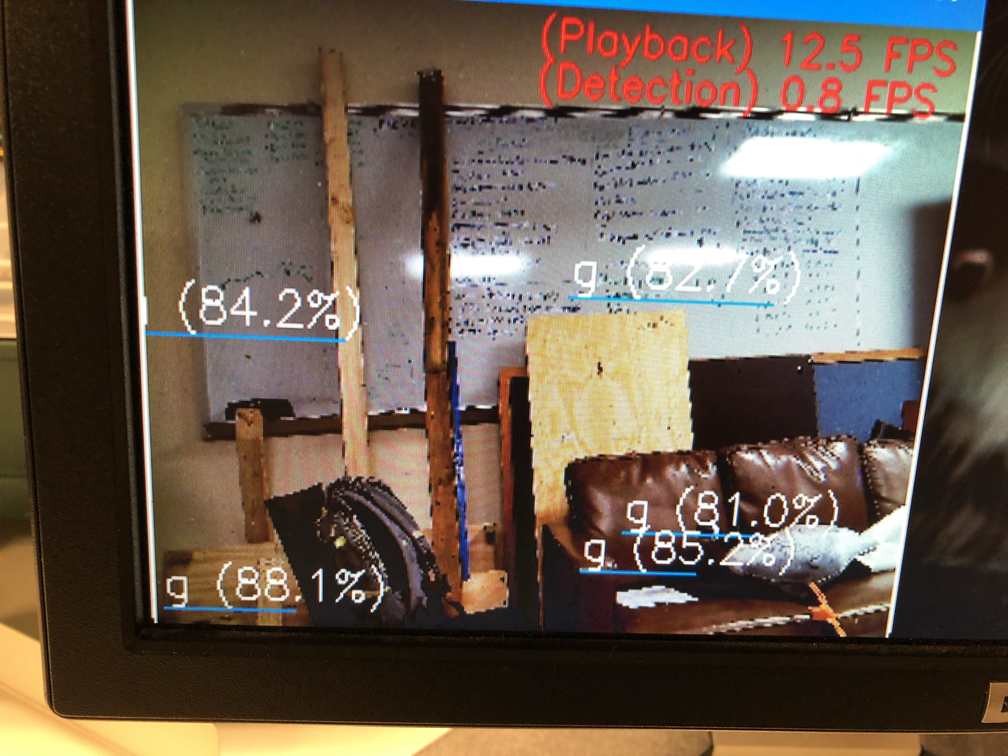
We trained a custom 1 class yolov3-tiny model using our dataset of ~3k images. (see config file below) converted to .pb and then converted to .xml and .bin successfully. However when we run inference on the NCS2 (which is attached to a Rasberry Pi 3 B with Rasbian Stretch) the output is garbage, showing dozens of detections constantly often with bounding boxes that are perfectly flat. The original darknet model does not do this and we have confirmed detects our class consistently and accurately. We are at a loss as to what could be the problem and have been working on this issues for over a week and could really use some help.
Additionally we tested the .pb file in the intermediate step of the conversion process and were able to detect our class with that. Below is the commands used, then the config file and json file and the python script used for inference. I have also attached an image of our garbage output.
COMMANDS
./darknet partial cfg/yolov3-tiny-goose.cfg yolov3-tiny.weights goose-weights.conv.15 15
./darknet detector train goose.data cfg/yolov3-tiny-goose.cfg goose-weights.conv.15
python3 convert_weights_pb.py --class_names goose.names --weights_file yolov3-tiny-goose_final.weights --data_format NHWC --tiny
sudo python3 /opt/intel/computer_vision_sdk/deployment_tools/model_optimizer/mo_tf.py --input_model frozen_darknet_yolov3_model.pb --output_dir lrmodels/tiny-YoloV3/FP16 --data_type FP16 --batch 1 --tensorflow_use_custom_operations_config yolov3_goose4.json
CONFIG FILE
[net]
# Testing
batch=24
subdivisions=8
# Training
# batch=64
# subdivisions=2
width=416
height=416
channels=3
momentum=0.9
decay=0.0005
angle=0
saturation = 1.5
exposure = 1.5
hue=.1
learning_rate=0.001
burn_in=1000
max_batches = 500200
policy=steps
steps=400000,450000
scales=.1,.1
[convolutional]
batch_normalize=1
filters=16
size=3
stride=1
pad=1
activation=leaky
[maxpool]
size=2
stride=2
[convolutional]
batch_normalize=1
filters=32
size=3
stride=1
pad=1
activation=leaky
[maxpool]
size=2
stride=2
[convolutional]
batch_normalize=1
filters=64
size=3
stride=1
pad=1
activation=leaky
[maxpool]
size=2
stride=2
[convolutional]
batch_normalize=1
filters=128
size=3
stride=1
pad=1
activation=leaky
[maxpool]
size=2
stride=2
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[maxpool]
size=2
stride=2
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[maxpool]
size=2
stride=1
[convolutional]
batch_normalize=1
filters=1024
size=3
stride=1
pad=1
activation=leaky
###########
[convolutional]
batch_normalize=1
filters=256
size=1
stride=1
pad=1
activation=leaky
[convolutional]
batch_normalize=1
filters=512
size=3
stride=1
pad=1
activation=leaky
[convolutional]
size=1
stride=1
pad=1
filters=18
activation=linear
[yolo]
mask = 3,4,5
anchors = 10,14, 23,27, 37,58, 81,82, 135,169, 344,319
classes=1
num=6
jitter=.3
ignore_thresh = .7
truth_thresh = 1
random=1
[route]
layers = -4
[convolutional]
batch_normalize=1
filters=128
size=1
stride=1
pad=1
activation=leaky
[upsample]
stride=2
[route]
layers = -1, 8
[convolutional]
batch_normalize=1
filters=256
size=3
stride=1
pad=1
activation=leaky
[convolutional]
size=1
stride=1
pad=1
filters=18
activation=linear
[yolo]
mask = 0,1,2
anchors = 10,14, 23,27, 37,58, 81,82, 135,169, 344,319
classes=1
num=6
jitter=.3
ignore_thresh = .7
truth_thresh = 1
random=1
JSON FILE
[
{
"id": "TFYOLOV3",
"match_kind": "general",
"custom_attributes": {
"classes": 1,
"coords": 4,
"num": 6,
"mask": [0,1,2],
"anchors":[10,14,23,27,37,58,81,82,135,169,344,319],
"entry_points": ["detector/yolo-v3-tiny/Reshape","detector/yolo-v3-tiny/Reshape_4"]
}
}
]
INFERENCE SCRIPT
import sys, os, cv2, time, heapq, argparse
import numpy as np, math
from openvino.inference_engine import IENetwork, IEPlugin
import multiprocessing as mp
from time import sleep
import threading
yolo_scale_13 = 13
yolo_scale_26 = 26
yolo_scale_52 = 52
classes = 1
coords = 4
num = 3
anchors = [10,14, 23,27, 37,58, 81,82, 135,169, 344,319]
LABELS = ("goose")
label_text_color = (255, 255, 255)
label_background_color = (125, 175, 75)
box_color = (255, 128, 0)
box_thickness = 1
processes = []
fps = ""
detectfps = ""
framecount = 0
detectframecount = 0
time1 = 0
time2 = 0
lastresults = None
def EntryIndex(side, lcoords, lclasses, location, entry):
n = int(location / (side * side))
loc = location % (side * side)
return int(n * side * side * (lcoords + lclasses + 1) + entry * side * side + loc)
class DetectionObject():
xmin = 0
ymin = 0
xmax = 0
ymax = 0
class_id = 0
confidence = 0.0
def __init__(self, x, y, h, w, class_id, confidence, h_scale, w_scale):
self.xmin = int((x - w / 2) * w_scale)
self.ymin = int((y - h / 2) * h_scale)
self.xmax = int(self.xmin + w * w_scale)
self.ymax = int(self.ymin + h * h_scale)
self.class_id = class_id
self.confidence = confidence
def IntersectionOverUnion(box_1, box_2):
width_of_overlap_area = min(box_1.xmax, box_2.xmax) - max(box_1.xmin, box_2.xmin)
height_of_overlap_area = min(box_1.ymax, box_2.ymax) - max(box_1.ymin, box_2.ymin)
area_of_overlap = 0.0
if (width_of_overlap_area < 0.0 or height_of_overlap_area < 0.0):
area_of_overlap = 0.0
else:
area_of_overlap = width_of_overlap_area * height_of_overlap_area
box_1_area = (box_1.ymax - box_1.ymin) * (box_1.xmax - box_1.xmin)
box_2_area = (box_2.ymax - box_2.ymin) * (box_2.xmax - box_2.xmin)
area_of_union = box_1_area + box_2_area - area_of_overlap
retval = 0.0
if area_of_union <= 0.0:
retval = 0.0
else:
retval = (area_of_overlap / area_of_union)
return retval
def ParseYOLOV3Output(blob, resized_im_h, resized_im_w, original_im_h, original_im_w, threshold, objects):
out_blob_h = blob.shape[2]
out_blob_w = blob.shape[3]
side = out_blob_h
anchor_offset = 0
if side == yolo_scale_13:
anchor_offset = 2 * 3
elif side == yolo_scale_26:
anchor_offset = 2 * 0
side_square = side * side
output_blob = blob.flatten()
for i in range(side_square):
row = int(i / side)
col = int(i % side)
for n in range(num):
obj_index = EntryIndex(side, coords, classes, n * side * side + i, coords)
box_index = EntryIndex(side, coords, classes, n * side * side + i, 0)
scale = output_blob[obj_index]
if (scale < threshold):
continue
x = (col + output_blob[box_index + 0 * side_square]) / side * resized_im_w
print("box_index:",box_index)
print("output_blob:",output_blob[box_index + 0 * side_square])
y = (row + output_blob[box_index + 1 * side_square]) / side * resized_im_h
height = math.exp(output_blob[box_index + 3 * side_square]) * anchors[anchor_offset + 2 * n + 1]
width = math.exp(output_blob[box_index + 2 * side_square]) * anchors[anchor_offset + 2 * n]
for j in range(classes):
class_index = EntryIndex(side, coords, classes, n * side_square + i, coords + 1 + j)
prob = scale * output_blob[class_index]
if prob < threshold:
continue
obj = DetectionObject(x, y, height, width, j, prob, (original_im_h / resized_im_h), (original_im_w / resized_im_w))
#print(x, y, height, width, j, prob, (original_im_h / resized_im_h), (original_im_w / resized_im_w))
objects.append(obj)
return objects
def ParseTest(blob, resized_im_h, resized_im_w, original_im_h, original_im_w, threshold, objects):
side = 13
anchor_offset = 6
side_square = side * side
output_blob = blob
for i in range(side_square):
row = int(i / side)
col = int(i % side)
for n in range(num):
print("x " + str(output_blob[0][n+0][row][col]) + " y " + str(output_blob[0][n+1][row][col]) + " w " + str(output_blob[0][n+2][row][col]) + " h " + str(output_blob[0][n+3][row][col]) + " prob " + str(output_blob[0][n+4][row][col]) + " class " + str(output_blob[0][n+5][row][col]))
print()
return objects
def camThread(LABELS, results, frameBuffer, camera_width, camera_height, vidfps):
global fps
global detectfps
global lastresults
global framecount
global detectframecount
global time1
global time2
global cam
global window_name
cam = cv2.VideoCapture(0)
if cam.isOpened() != True:
print("USB Camera Open Error!!!")
sys.exit(0)
cam.set(cv2.CAP_PROP_FPS, vidfps)
cam.set(cv2.CAP_PROP_FRAME_WIDTH, camera_width)
cam.set(cv2.CAP_PROP_FRAME_HEIGHT, camera_height)
window_name = "USB Camera"
wait_key_time = 1
#cam = cv2.VideoCapture("data/input/testvideo4.mp4")
#camera_width = int(cam.get(cv2.CAP_PROP_FRAME_WIDTH))
#camera_height = int(cam.get(cv2.CAP_PROP_FRAME_HEIGHT))
#frame_count = int(cam.get(cv2.CAP_PROP_FRAME_COUNT))
#window_name = "Movie File"
#wait_key_time = int(1000 / vidfps)
cv2.namedWindow(window_name, cv2.WINDOW_AUTOSIZE)
while True:
t1 = time.perf_counter()
# USB Camera Stream Read
# should be: cam.read()
s, color_image = cam.read()
if not s:
continue
if frameBuffer.full():
frameBuffer.get()
height = color_image.shape[0]
width = color_image.shape[1]
frameBuffer.put(color_image.copy())
if not results.empty():
objects = results.get(False)
detectframecount += 1
for obj in objects:
if obj.confidence < 0.2:
continue
label = obj.class_id
confidence = obj.confidence
if confidence > 0.2:
label_text = LABELS[label] + " (" + "{:.1f}".format(confidence * 100) + "%)"
cv2.rectangle(color_image, (obj.xmin, obj.ymin), (obj.xmax, obj.ymax), box_color, box_thickness)
cv2.putText(color_image, label_text, (obj.xmin, obj.ymin - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.6, label_text_color, 1)
lastresults = objects
else:
if not isinstance(lastresults, type(None)):
for obj in lastresults:
if obj.confidence < 0.2:
continue
label = obj.class_id
confidence = obj.confidence
if confidence > 0.2:
label_text = LABELS[label] + " (" + "{:.1f}".format(confidence * 100) + "%)"
cv2.rectangle(color_image, (obj.xmin, obj.ymin), (obj.xmax, obj.ymax), box_color, box_thickness)
cv2.putText(color_image, label_text, (obj.xmin, obj.ymin - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.6, label_text_color, 1)
cv2.putText(color_image, fps, (width-170,15), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (38,0,255), 1, cv2.LINE_AA)
cv2.putText(color_image, detectfps, (width-170,30), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (38,0,255), 1, cv2.LINE_AA)
cv2.imshow(window_name, cv2.resize(color_image, (width, height)))
if cv2.waitKey(wait_key_time)&0xFF == ord('q'):
sys.exit(0)
## Print FPS
framecount += 1
if framecount >= 15:
fps = "(Playback) {:.1f} FPS".format(time1/15)
detectfps = "(Detection) {:.1f} FPS".format(detectframecount/time2)
framecount = 0
detectframecount = 0
time1 = 0
time2 = 0
t2 = time.perf_counter()
elapsedTime = t2-t1
time1 += 1/elapsedTime
time2 += elapsedTime
# l = Search list
# x = Search target value
def searchlist(l, x, notfoundvalue=-1):
if x in l:
return l.index(x)
else:
return notfoundvalue
def async_infer(ncsworker):
#ncsworker.skip_frame_measurement()
while True:
ncsworker.predict_async()
class NcsWorker(object):
def __init__(self, devid, frameBuffer, results, camera_width, camera_height, number_of_ncs, vidfps):
self.devid = devid
self.frameBuffer = frameBuffer
self.model_xml = "./lrmodels/tiny-YoloV3/FP16/frozen_darknet_yolov3_model.xml"
self.model_bin = "./lrmodels/tiny-YoloV3/FP16/frozen_darknet_yolov3_model.bin"
self.camera_width = camera_width
self.camera_height = camera_height
self.m_input_size = 416
self.threshould = 0.8
self.num_requests = 4
self.inferred_request = [0] * self.num_requests
self.heap_request = []
self.inferred_cnt = 0
self.plugin = IEPlugin(device="MYRIAD")
self.net = IENetwork(model=self.model_xml, weights=self.model_bin)
self.input_blob = next(iter(self.net.inputs))
self.exec_net = self.plugin.load(network=self.net, num_requests=self.num_requests)
self.results = results
self.number_of_ncs = number_of_ncs
self.predict_async_time = 800
self.skip_frame = 0
self.roop_frame = 0
self.vidfps = vidfps
self.new_w = int(camera_width * min(self.m_input_size/camera_width, self.m_input_size/camera_height))
self.new_h = int(camera_height * min(self.m_input_size/camera_width, self.m_input_size/camera_height))
def image_preprocessing(self, color_image):
resized_image = cv2.resize(color_image, (self.new_w, self.new_h), interpolation = cv2.INTER_CUBIC)
canvas = np.full((self.m_input_size, self.m_input_size, 3), 128)
canvas[(self.m_input_size-self.new_h)//2:(self.m_input_size-self.new_h)//2 + self.new_h,(self.m_input_size-self.new_w)//2:(self.m_input_size-self.new_w)//2 + self.new_w, :] = resized_image
prepimg = canvas
prepimg = prepimg[np.newaxis, :, :, :] # Batch size axis add
prepimg = prepimg.transpose((0, 3, 1, 2)) # NHWC to NCHW
return prepimg
def skip_frame_measurement(self):
surplustime_per_second = (1000 - self.predict_async_time)
if surplustime_per_second > 0.0:
frame_per_millisecond = (1000 / self.vidfps)
total_skip_frame = surplustime_per_second / frame_per_millisecond
self.skip_frame = int(total_skip_frame / self.num_requests)
else:
self.skip_frame = 0
def predict_async(self):
try:
if self.frameBuffer.empty():
return
self.roop_frame += 1
if self.roop_frame <= self.skip_frame:
self.frameBuffer.get()
return
self.roop_frame = 0
prepimg = self.image_preprocessing(self.frameBuffer.get())
reqnum = searchlist(self.inferred_request, 0)
#print("image transformed")
#print(reqnum)
if reqnum > -1:
#print("srting IEPluggin")
self.exec_net.start_async(request_id=reqnum, inputs={self.input_blob: prepimg})
self.inferred_request[reqnum] = 1
self.inferred_cnt += 1
if self.inferred_cnt == sys.maxsize:
#print("if ran")
self.inferred_request = [0] * self.num_requests
self.heap_request = []
self.inferred_cnt = 0
heapq.heappush(self.heap_request, (self.inferred_cnt, reqnum))
#print("heap pushed")
#print(reqnum)
cnt, dev = heapq.heappop(self.heap_request)
if self.exec_net.requests[dev].wait(0) == 0:
#print("if")
self.exec_net.requests[dev].wait(-1)
objects = []
outputs = self.exec_net.requests[dev].outputs
for output in outputs.values():
#
# change this
#
objects = ParseYOLOV3Output(output, self.new_h, self.new_w, self.camera_height, self.camera_width, self.threshould, objects)
objlen = len(objects)
for i in range(objlen):
if (objects.confidence == 0.0):
continue
for j in range(i + 1, objlen):
if (IntersectionOverUnion(objects, objects
if objects.confidence < objects
objects, objects
objects
self.results.put(objects)
self.inferred_request[dev] = 0
else:
#print("else")
heapq.heappush(self.heap_request, (cnt, dev))
except:
import traceback
traceback.print_exc()
def inferencer(results, frameBuffer, number_of_ncs, camera_width, camera_height, vidfps):
# Init infer threads
threads = []
for devid in range(number_of_ncs):
thworker = threading.Thread(target=async_infer, args=(NcsWorker(devid, frameBuffer, results, camera_width, camera_height, number_of_ncs, vidfps),))
thworker.start()
threads.append(thworker)
for th in threads:
th.join()
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('-numncs','--numberofncs',dest='number_of_ncs',type=int,default=1,help='Number of NCS. (Default=1)')
args = parser.parse_args()
number_of_ncs = args.number_of_ncs
camera_width = 320
camera_height = 240
vidfps = 30
try:
mp.set_start_method('forkserver')
frameBuffer = mp.Queue(10)
results = mp.Queue()
# Start detection MultiStick
# Activation of inferencer
p = mp.Process(target=inferencer, args=(results, frameBuffer, number_of_ncs, camera_width, camera_height, vidfps), daemon=True)
p.start()
processes.append(p)
sleep(number_of_ncs * 7)
# Start streaming
p = mp.Process(target=camThread, args=(LABELS, results, frameBuffer, camera_width, camera_height, vidfps), daemon=True)
p.start()
processes.append(p)
while True:
sleep(1)
except:
import traceback
traceback.print_exc()
finally:
for p in range(len(processes)):
processes
.terminate()
print("\n\nFinished\n\n")
{kind=link}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Dear David, the number of classes being just 1 is very suspect. See our default yolo_v3_tiny.json found under C:\Program Files (x86)\IntelSWTools\openvino_2019.1.087\deployment_tools\model_optimizer\extensions\front\tf (if you are using Windows 10):
[
{
"id": "TFYOLOV3",
"match_kind": "general",
"custom_attributes": {
"classes": 80,
"anchors": [10, 14, 23, 27, 37, 58, 81, 82, 135, 169, 344, 319],
"coords": 4,
"num": 6,
"mask": [0, 1, 2],
"entry_points": ["detector/yolo-v3-tiny/Reshape", "detector/yolo-v3-tiny/Reshape_4"]
}
}
]
Why are you restricting the number of classes to 1 ?
As This forum poster noticed, increasing the number of classes to 80 improves detection.
Hope it helps. Thanks for using OpenVino !
Shubha
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi David :)
I have the same issue.
I want to run my custom model that I trained. And I set classes to 2. Because I made two data training models.
If you have solved it, please comment ...
Thank you
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Dear Kim, Sangmin and David, the forum poster I referred to above improved his yolo3 by upgrading to 2019 R1. He had a similar issue to you. Are you using OpenVino 2019 R1 ?
Thanks,
Shubha
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page