- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello, I am developing with RealSense D435.
I have four real-sense.
I found the difference between D435s.
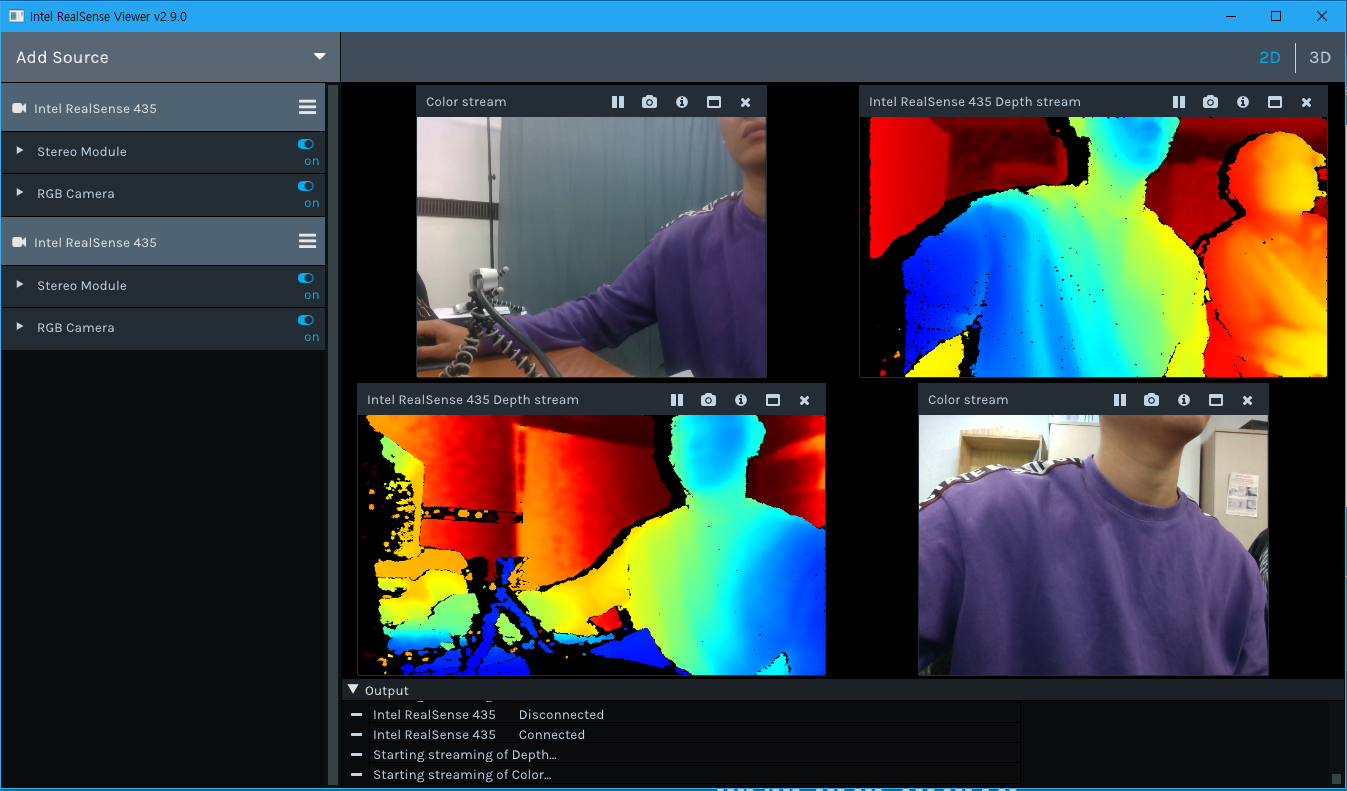
The image above shows the difference in depth frames.
I think two cameras on the left are good, and two cameras on the right are bad.
Is this a hardware problem? or Is it a hardware problem?
What is the solution to this problem?
please help.
{kind=link}
{kind=link}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
It looks as though the primary cause of the "bad" images may be that the cameras at that viewpoint are too close to your body. The closer the camera is to an object of person, the more the image breaks up in the way shown in the top corner of your lower image.
You can test this principle by holding a camera in your hand and observing the depth stream break up more and more as you move the camera towards your body.
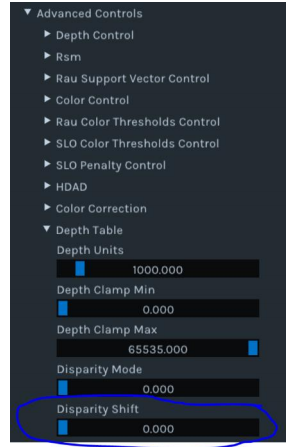
You can reduce the camera's minimum distance (MinZ) by altering the Disparity Shift setting in the Viewer. As Disparity Shift is increased to reduce MinZ, the trade-off is that the maximum distance (MaxZ) reduces.
For example, according to Intel's camera tuning guide, a Disparity Shift of '0' gives a MinZ of 45 cm and an infinite MaxZ, whilst setting the shift to '50' gives a MinZ of 30 cm and a MaxZ of 110 cm.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
please check the video
I tried to look at object far away from the camera and I tried to tune the 'Disparity Shift'
As shown in the video, the depth image difference between two D435 is huge.
There are far more bad images on one side.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
It looks as though adjusting MinZ with the Disparity Shift may not have been the most suitable method in this case. Although it is enabling the camera to be closer to the body, the reduction in MaxZ means that the camera's forward view distance becomes too short and cannot see as far as the position where the body is.
The image of your tripod mounting setup shows that one camera is going to be closer to the body than the other one because its mounting point puts it further ahead. It looks as though the "bad" image is coming from the upper camera that is further back though, judging by the height of the cabinet and desk fan in the depth image. It is a strange case. The break-up of the stream is symptomatic of being too close to what is being observed, yet the camera is mounted further away than the "good" camera.
The worst of the break-up is in the background of the image. I would recommend eliminating the possibility that the upper camera is exceeding its MaxZ sensing distance by moving the tripod to the front of the top of the computer, so that the upper camera is in roughly the same position that the "good" camera is now. If the "bad" camera image improves in that position, that would add to the possibility that it is a distance related problem. D435 has greater depth noise over distance than the D415 model does.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
No, that's not the case. The D435 camera can't get an error by 5cm.
as you can see below picture, camera of 'good' imageis located high.
please check the video..
I think the camera hardware is bad.
Can I get a repair?
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
There does not seem to be any camera related information in the video.
RealSense cameras cannot be sent for repair. You can file a claim for a refund or replacement. Before you do so though, I recommend trying a 'gold reset' of the camera to factory-new status. You can do this by downloading the 400 Series calibration tool - file name CalibrationAPI-2.6.4.0-Setup.exe - from the link below and then using this instruction:
Intel.Realsense.CustomRW.exe -g
https://downloadcenter.intel.com/download/27955/Intel-RealSense-D400-Series-Calibration-Tools-and-API?v=t Download Intel® RealSense™ D400 Series Calibration Tools and API
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi suho,
Please make sure the cameras have the latest firmware and upgrade RealSense Viewer and the SDK to the latest versions.
You should also set the preset for both cameras to High Density.
Let me know how it goes.
Regards,
Alexandra
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi suho,
Did you follow the instructions I gave you?
Do you still need help with your issue?
Regards,
Alexandra
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page