- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi
I used the lastest R3 version to converted the yolov3 model and it finally worked on the CPU.
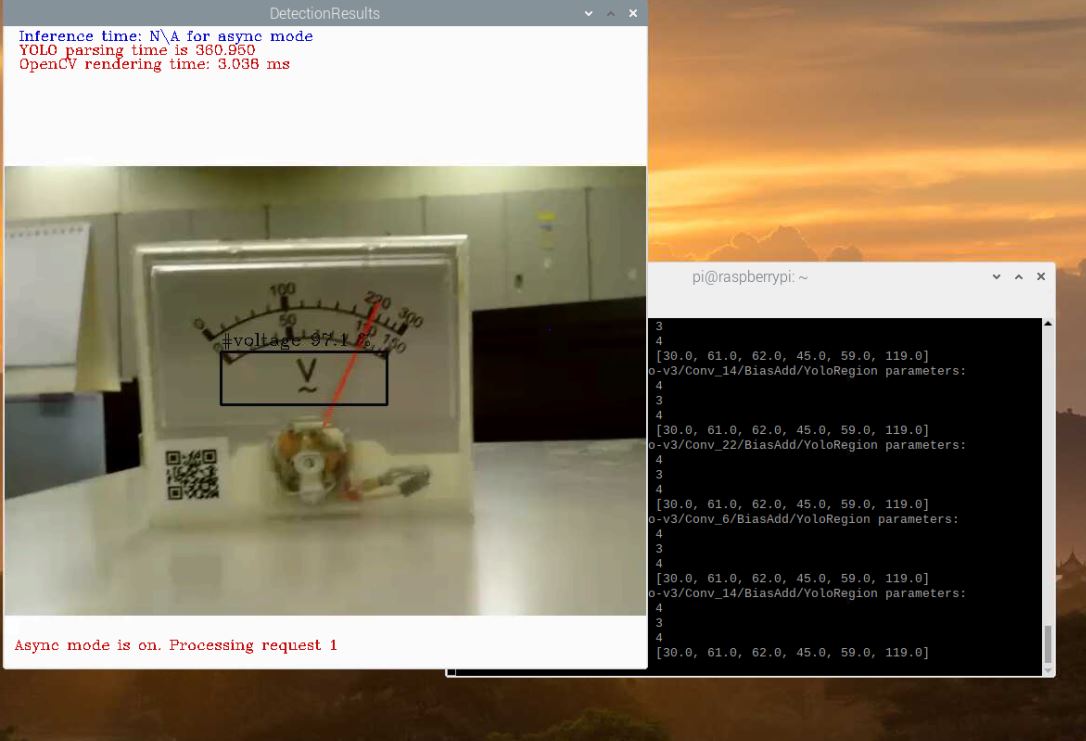
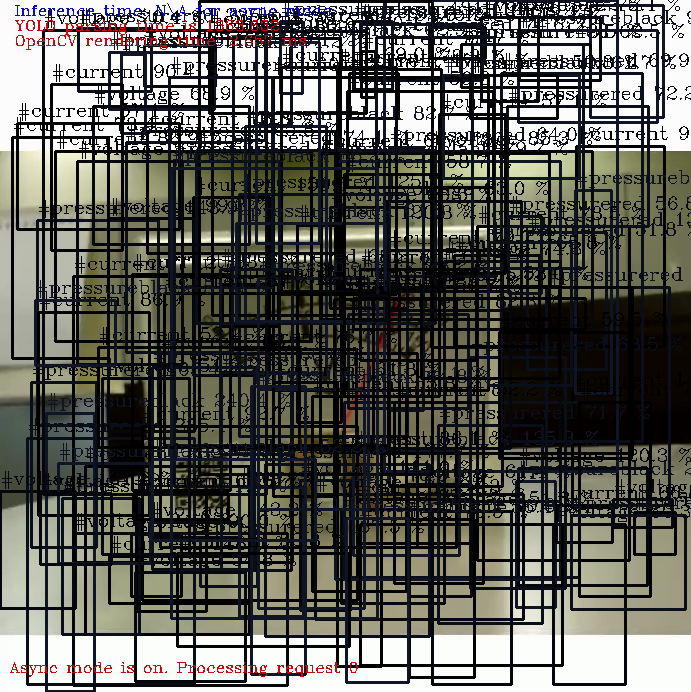
But I have a problem that when I use the same object_detection_demo_yolov3_async.py script on the NCS with raspberry pi, the output of the detection result is strange. when using the CPU the issue doesn't happened. the photo is the comparison of while using -d CPU and -d MYRIAD.
the command I use for CPU:
python3 object_detection_demo_yolov3_async.py --model lrmodels/yolov3_meter_r3/FP32/r_channel/darknet_yolov3_meter.xml -d CPU --cpu_extension /opt/intel/openvino_2019.3.376/deployment_tools/inference_engine/lib/intel64/libcpu_extension_sse4.so
the command I use for MYRIAD on NCS raspberry pi:
python3 pi_object_detection_demo_yolov3_async.py --model lrmodels/yolov3_meter_r3/FP16/r_channel/darknet_yolov3_meter.xml -d MYRIAD
Could you also help me with this problem?
Regards
Liheng.
附件:
{kind=link}
{kind=link}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi mo, liheng,
I believe we were working on a different thread where you had issues with your model's accuracy when using OpenVINO, the thread is here. However, we can continue our conversation on this new thread for better clarity.
I have tried your model on the Raspberry Pi using the object_detection_demo_yolov3_async.py script found in the OMZ (Open Model Zoo) and I can see the model is working. I had to clone the repository to my Pi's home directory. One thing I had to do though was to create an .mp4 version of your test images for the demo to work, as I was having issues using the .jpg images. Find a screenshot attached (detection.jpg).
I'm including the model (fp16.zip), .mp4 file and python script (testfile.zip) for you to test. May I ask which python script are you using to test your model?
Commands:
source /opt/intel/openvino/bin/setupvars.sh python3 ~/open_model_zoo/demos/python_demos/object_detection_demo_yolov3_async/object_detection_demo_yolov3_async.py -m darknet_yolov3_meter.xml -i 20191002050544_1.mp4 --l meter.names -d MYRIAD
Regards,
Luis
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi
thank you for your reply and help. I will try the script that you provide.
By my side, I am using the script under the ~/opt/intel/openvino_2019.3.376/deployment_tools/open_model_zoo/demos/python_demos/object_detection_demo_yolov3_async.
Regards,
Liheng.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
{kind=link}
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I tested this using an RPi Model 3B+ with Raspbian* Buster and an NCS2, I followed the OpenVINO installation as mentioned in the documentation. If you haven't tried the install verification demos on your NCS, I'd suggest doing so if possible and sharing the results of those demos (demo_squezeenet* and demo_security_camera*), to make sure the NCS HW is working properly.
Also I wanted to mention, in my RPi I don't see the script path you shared previously. It looks like the OpenVINO package for Raspbian* doesn't include it (l_openvino_toolkit_runtime_raspbian_p_2019.3.334.tgz).
Which RPi board version and OS are you using? Is it an NCS or an NCS2? Is this the package (l_openvino_toolkit_runtime_raspbian_p_2019.3.334.tgz) you used to install on your RPi? How did you install OpenVINO on your board?
Regards,
Luis
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi.
yes. I am using that package(l_openvino_toolkit_runtime_raspbian_p_2019.3.334.tgz) and installed it following the official document.
This package doesn't include the yolov3 demo script. I am using the script from that open_model_zoo that you mentioned before to do the test.
My RPi version is Pi Model 3B V1.2, and the os version is Raspbian GNU/Linux 9 (stretch). I am using the movidius NCS.
Regards
Liheng.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi
I have tried to reinstall the openvino package following the document. And also run the face detection demo programme in the document and tried the ssd demo script in the open model zoo(object_detection_demo_ssd_async.py). This 2 demo both worked. It means that my NCS HW is working. But just when I returned to test the yolov3 demo script(object_detection_demo_yolov3_async.py), it still has the same issue as before.
here is the detection result when i use the ssd demo script to detect the face.
look forward to the further discussion.
Regards
Liheng
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Thanks for the information, I am unable to see the issue with the NCS2 but I can reproduce with the Intel Movidius NCS. It looks like this is a bug which has already been reported, I will let you know as soon as we have any updates to share. Sorry for the inconvenience this may cause!
Regards,
Luis
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page