- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello,
I run the commands as the website: https://github.com/IntelRealSense/realsense_samples_ros/blob/kinetic-devel/realsense_ros_slam/README.md realsense_samples_ros/README.md at kinetic-devel · IntelRealSense/realsense_samples_ros · GitHub
$ cd catkin_ws
$ source devel/setup.bash
$ roslaunch realsense_ros_slam demo_slam.launch
And the terminal shows as following including two cases.
Case 1:
yuanlibin@yuanlibin:~/catkin_ws$ roslaunch realsense_ros_slam demo_slam.launch
... logging to /home/yuanlibin/.ros/log/ce3f41f2-63b1-11e8-9c51-1c1b0d61bf22/roslaunch-yuanlibin-2914.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://yuanlibin:43883/ http://yuanlibin:43883/
SUMMARYPARAMETERS
- /realsense_ros_camera/accel_optical_frame_id: camera_accel_opti...
- /realsense_ros_camera/color_fps: 30
- /realsense_ros_camera/color_height: 480
- /realsense_ros_camera/color_optical_frame_id: camera_rgb_optica...
- /realsense_ros_camera/color_width: 640
- /realsense_ros_camera/depth_fps: 30
- /realsense_ros_camera/depth_height: 240
- /realsense_ros_camera/depth_optical_frame_id: camera_depth_opti...
- /realsense_ros_camera/depth_width: 320
- /realsense_ros_camera/enable_color: False
- /realsense_ros_camera/enable_depth: True
- /realsense_ros_camera/enable_fisheye: True
- /realsense_ros_camera/fisheye_fps: 30
- /realsense_ros_camera/fisheye_height: 480
- /realsense_ros_camera/fisheye_optical_frame_id: camera_fisheye_op...
- /realsense_ros_camera/fisheye_width: 640
- /realsense_ros_camera/gyro_optical_frame_id: camera_gyro_optic...
- /realsense_ros_camera/ir2_optical_frame_id: camera_ir2_optica...
- /realsense_ros_camera/ir_optical_frame_id: camera_ir_optical...
- /realsense_ros_camera/serial_no:
- /realsense_ros_slam/doi_max: 3.0
- /realsense_ros_slam/doi_min: 0.3
- /realsense_ros_slam/hoi_max: 0.1
- /realsense_ros_slam/hoi_min: -0.5
- /realsense_ros_slam/load_occupancy_map:
- /realsense_ros_slam/load_relocalization_map:
- /realsense_ros_slam/map_resolution: 0.05
- /realsense_ros_slam/occupancyFilename: occupancy_1019.bin
- /realsense_ros_slam/publish_odometry: True
- /realsense_ros_slam/relocalizationFilename: relocalization_10...
- /realsense_ros_slam/resolution: 0.1
- /realsense_ros_slam/topic_camera_pose: camera_pose
- /realsense_ros_slam/topic_map: map
- /realsense_ros_slam/topic_odom: odom
- /realsense_ros_slam/topic_pose2d: pose2d
- /realsense_ros_slam/topic_reloc_pose: reloc_pose
- /realsense_ros_slam/topic_tracking_accuracy: tracking_accuracy
- /realsense_ros_slam/trajectoryFilename: trajectory_1019.ppm
- /rosdistro: kinetic
- /rosversion: 1.12.13
NODES
/
base_link_to_camera_link (tf2_ros/static_transform_publisher)
map_to_odom (tf2_ros/static_transform_publisher)
odom_to_base_link (tf2_ros/static_transform_publisher)
realsense_ros_camera (nodelet/nodelet)
realsense_ros_camera_manager (nodelet/nodelet)
realsense_ros_slam (nodelet/nodelet)
rviz_demo (rviz/rviz)auto-starting new master
process[master]: started with pid [2926]
ROS_MASTER_URI=http://localhost:11311/ http://localhost:11311setting /run_id to ce3f41f2-63b1-11e8-9c51-1c1b0d61bf22
process[rosout-1]: started with pid [2939]
started core service [/rosout]
process[realsense_ros_camera_manager-2]: started with pid [2957]
process[realsense_ros_camera-3]: started with pid [2958]
process[map_to_odom-4]: started with pid [2959]
process[base_link_to_camera_link-5]: started with pid [2967]
[ INFO] [1527647595.983569884]: Loading nodelet /realsense_ros_camera of type realsense_ros_camera/NodeletCamera to manager realsense_ros_camera_manager with the following remappings:
process[odom_to_base_link-6]: started with pid [2969]
process[rviz_demo-7]: started with pid [2982]
process[realsense_ros_slam-8]: started with pid [2995]
[ INFO] [1527647596.006325421]: waitForService: Service [/realsense_ros_camera_manager/load_nodelet] has not been advertised, waiting...
X...
{kind=link}
{kind=link}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
It was difficult to tell what was happening from looking at the logs. The problems seem to start when this error occurs:
terminate called after throwing an instance of 'std::runtime_error' what(): Duration is out of dual 32-bit range
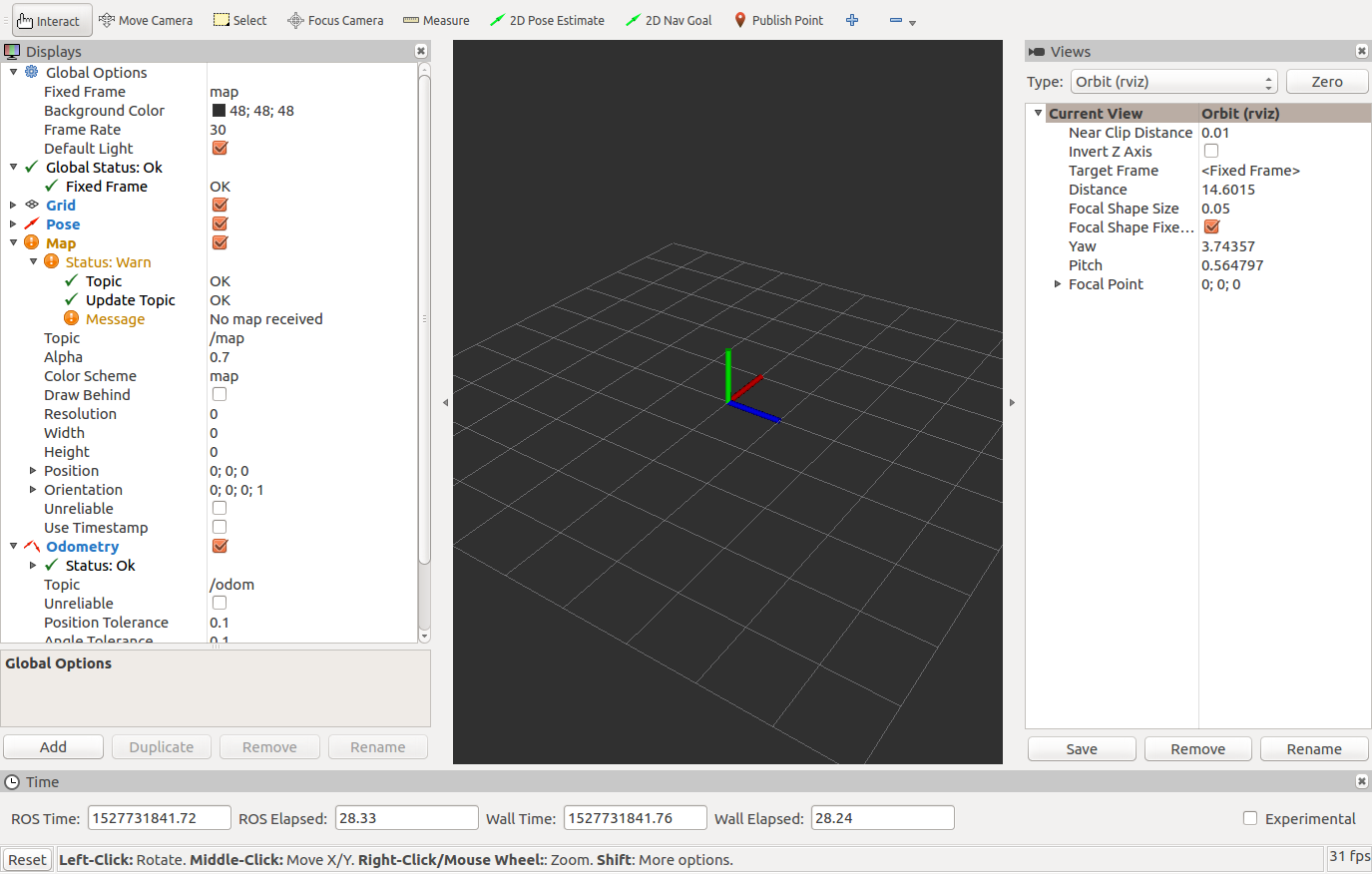
This can cause a 'No map received' error to occur in Rviz, like in this case:
https://github.com/ROBOTIS-GIT/turtlebot3/issues/83 No map error in RVIZ · Issue # 83 · ROBOTIS-GIT/turtlebot3 · GitHub
This error apparently occurs when a timestamp is out of sync (for example, when connecting two machines, and one is not in sync with the other).
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
MartyG
Thanks for your quick reply. I have tried the method from the link, however, it does not work.
In addition, my dual system includes Ubuntu 16.04 and Windows 10.
Libin
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
This question of dual systems is outside of my field of knowledge, unfortunately. I will link this conversation to McCool who is a SLAM and robotics expert who may have a better idea about what the problem with your project is. Good luck!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
MartyG
Thank you very much. And there is a similar issue at this link: https://github.com/IntelRealSense/realsense_samples_ros/issues/14 SLAM Problem · Issue # 14 · IntelRealSense/realsense_samples_ros · GitHub
Libin
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page