- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
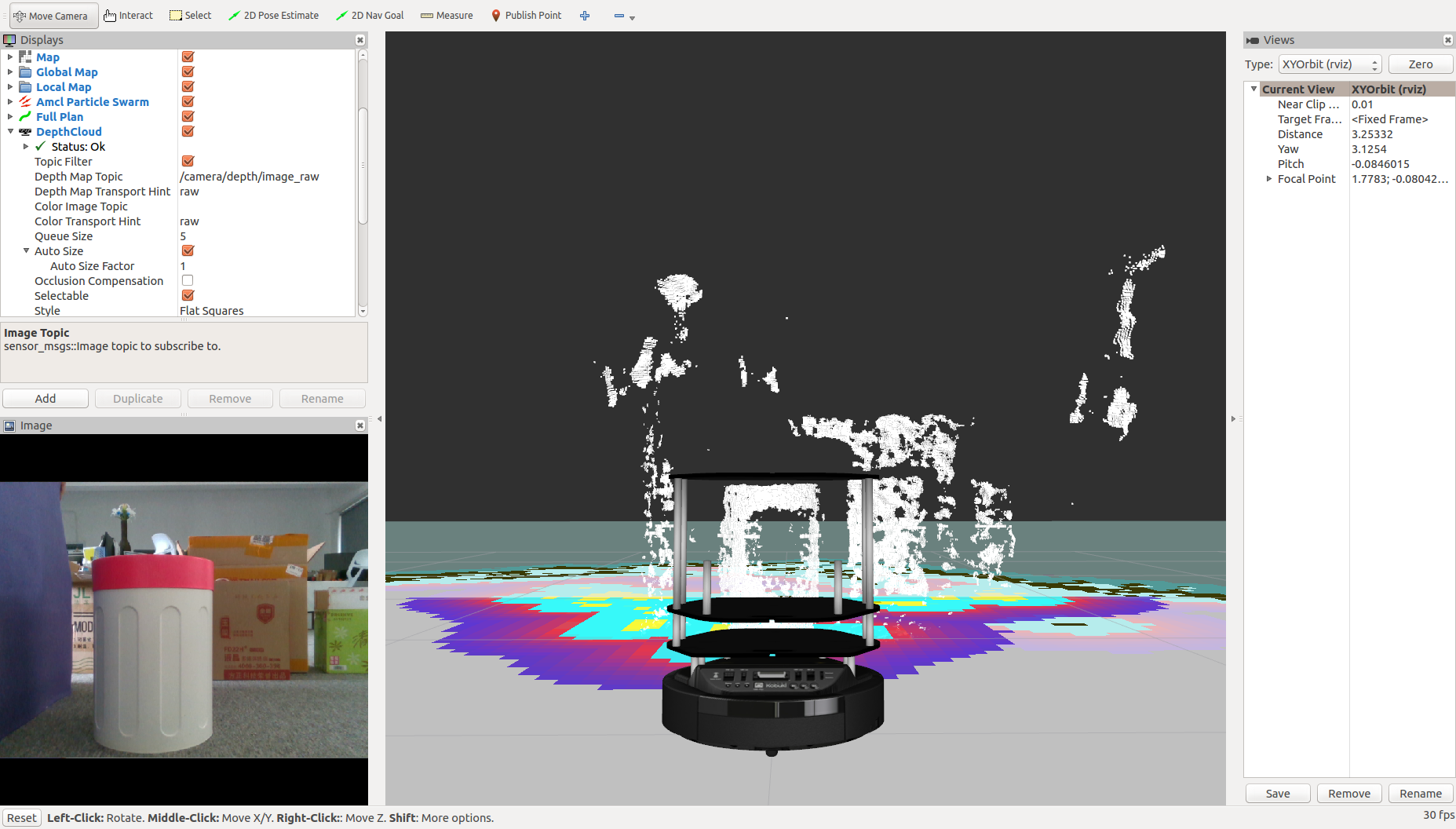
I'm trying to run turtlebot nodes with default settings on Euclid. However, the stereo camera performed really bad in good lighting conditions, even the aged Asus Xtion outperform Euclid's camera. Are there any methods I can use to improve the performance of that camera?
Using Euclid....Hardly saw the bin.
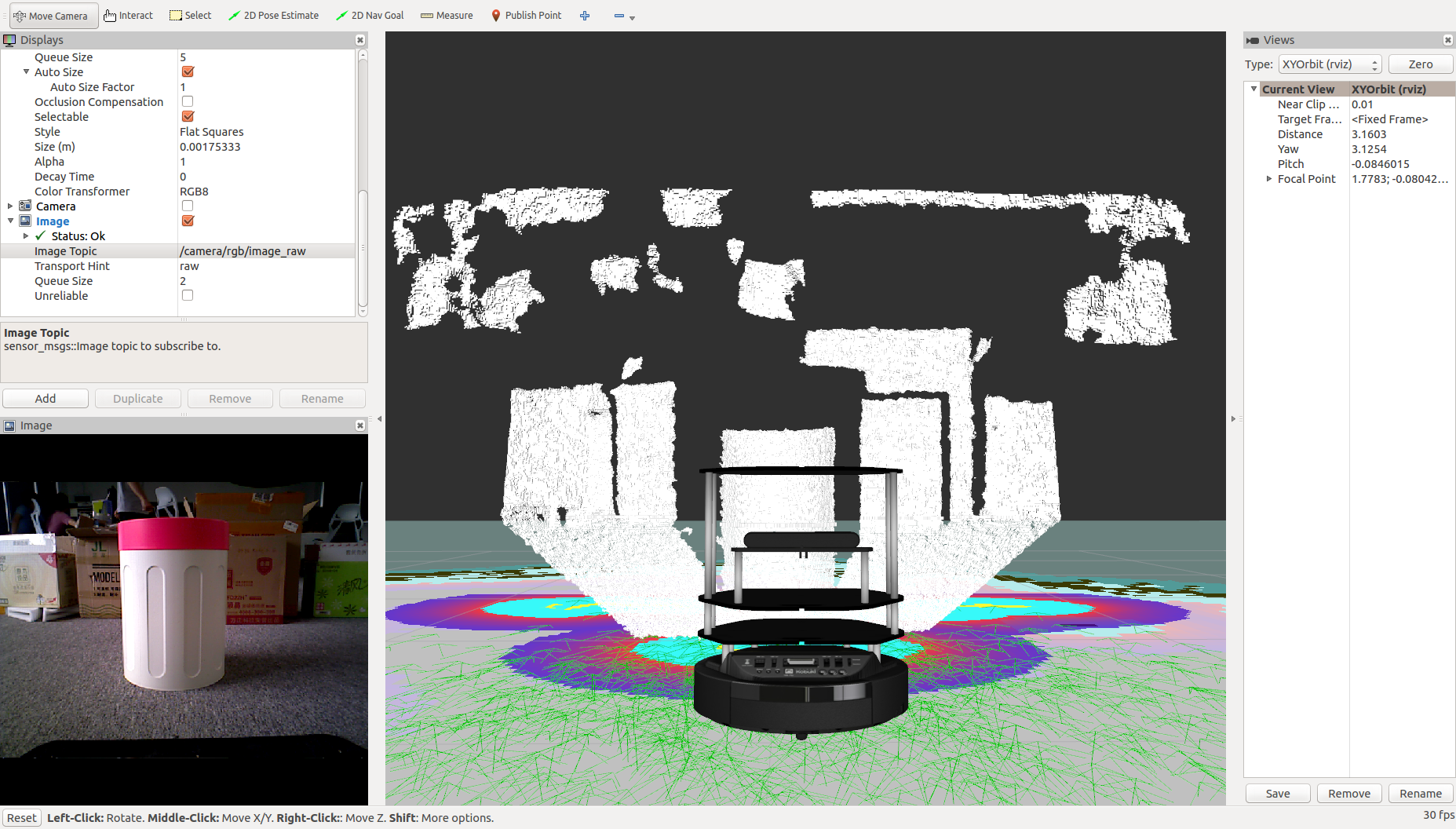
I tried to block some light....improve just a little bit, still not good at all. Then I had xtion in the same scene at the same time..wow....
could clearly see the bin, boxes and carpet......
The position of turtlebot when I tested those two cameras.
The command lines I used for the test:
roslaunch turtlebot_bringup minimal.launch
roslaunch turtlebot_navigation amcl_demo.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch (then in rviz, change the view type to XYorbit)
I would be grateful for any help you are able to provide!
Message was edited by: Buming Chen
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Link copiado
- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
Hi BryceChen,
Thank you for contacting us. Please allow us to investigate. We'll come back to you as soon as we have more information to share.
We appreciate your patience.
-Sergio A
- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
Hi BryceChen,
Thank you for your patience. You can try lowering the depth gain parameter. Sometimes a high gain results in a noisy image.
Let us know if this improves your results.
-Sergio A
- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
Hi,
Try to run the dynamic calibration process.
see here: https://click.intel.com/media/productid2100_10052017/dynamic_calibration_guide.pdf https://click.intel.com/media/productid2100_10052017/dynamic_calibration_guide.pdf
Thanks,
Amit
- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
Hi BryceChen,
Do you still need assistance with this thread?
-Sergio A
- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
Hi Sergio,
Apologize for my late reply. Lowering the depth gain (in ROS is r200_lr_gain) to 100 did improve the camera's performance. However, it was still not as clear as Asus Xtion. I have been busy lately and have not tried amitmoran's advice yet. I will try to tune other parameters in the future to see if further improvement is possible. By the way, do you know where I can find all drivers for Euclid? I would like to install server version ubuntu on Euclid since the desktop version is still too heavy for my application (a compute stick with z8350 cpu and ubuntu 16.04 server runs my path planner node faster than Euclid with z8700).
- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
You can download the complete Euclid image from a link in the forum discussion below. The image link on that page starts the download automatically in your browser when clicked.
- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
- Marcar como novo
- Marcador
- Subscrever
- Silenciar
- Subscrever fonte RSS
- Destacar
- Imprimir
- Denunciar conteúdo inapropriado
Thanks Amit! I saw that link but wasn't sure if the source code could be compiled into the "drivers" that BryceChen was asking for.
- Subscrever fonte RSS
- Marcar tópico como novo
- Marcar tópico como lido
- Flutuar este Tópico para o utilizador atual
- Marcador
- Subscrever
- Página amigável para impressora