- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello All,
I'm having a bear of a time getting up and running with Pyrealsense2 python bindings as part of the Intel RealSense SDK v2.7.9 release (with the ultimate goal of using it with OpenCV 3.3's python bindings). I can't seem to find much actual documentation on use and almost no examples. Generally, because the bindings are advertised as Cython wrappers I assume that less some obvious syntactical differences any C++ example should work using the python wrappers. I've already run into three issues I can't figure out doing this and would be very grateful if anyone reading this can help me out a bit (or point me in the right direction)!
Colorize Doesn't Colorize:
Using the following snippet adapted from the simple example in the repo:
# First import the library
import numpy as np
import cv2
import pyrealsense2 as rs2
c = rs2.colorizer()
# Create a context object. This object owns the handles to all connected
# realsense devices
pipeline = rs2.pipeline()
pipeline.start()
while True:
# This call waits until a new coherent set of frames is available on a
# device. Calls to get_frame_data(...) and get_frame_timestamp(...) on a
# device will return stable values until wait_for_frames(...) is called.
frames = pipeline.wait_for_frames()
color = frames.get_color_frame()
depth = frames.get_depth_frame()
if (not depth) or (not color):
print("Color or Depth not available!")
break
depth_RGB = c.colorize(depth)
depth_img = np.asanyarray(depth_RGB.get_data())
# Show the image in a new window
cv2.namedWindow("Depth",cv2.WINDOW_NORMAL)
cv2.resizeWindow("Depth",640,480)
cv2.imshow("Depth",depth_img)
cv2.waitKey(0)
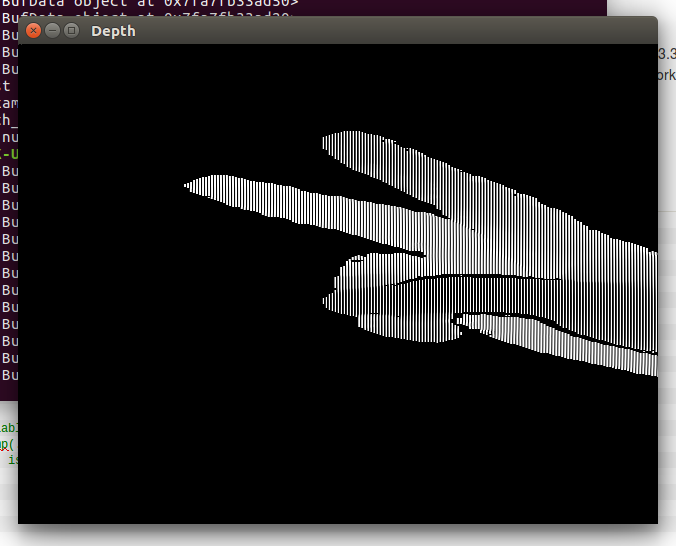
I get an image that looks something like below. It's limited to a reduced ROI in the full depth sensor field of view, "squashed" vertically, and certainly not re-colorized into 3 channel RGB of BGR.
Can't Discard Null Frame References:
In the same script I have the issue that the color frame stream always returns null frame references and the depth frame stream sometimes does as well. When this happens the statement `if (not depth) or (not color): break` is unsuccessful at preventing get_data from throwing an exception with `RuntimeError: null pointer passed for argument "frame_ref"`
No Implementation of Align:
A look at python.cpp seems to suggest that the python bindings do not implement the equivalent of rs2::context.create_align(RS2_STREAM_COLOR) as shown in the align C++ example. Is that the case, is this planned for future implementation?
I'm getting the sense it might be a better idea to work with librealsense exclusively in C++ to write a subroutine for frame grabbing, alignment transformation, and processing/clipping that called from a python environment with numpy and the OpenCV python bindings. Does that sound right?
Thanks again!
System ConfigurationCamera ModelSR300Firmware Version3.21.0.0Operating System VersionUbuntu 16.04 LTSKernel Version4.10.0-35-generic (UVC Patched)- Tags:
- Python
{kind=link}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I have very little knowledge of Python coding, so may not be of much help here. I did look at an SDK 2.0 script reference though, and noticed that it used the 'frameset' instruction instead of 'frames' for get_color_frame and get_depth_frame. So maybe you could try changing these lines to:
color = frameset.get_color_frame()
depth = frameset.get_depth_frame()
This is the page I referred to:
https://github.com/IntelRealSense/librealsense/tree/development/examples/align librealsense/examples/align at development · IntelRealSense/librealsense · GitHub
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi Ryank,
Have you tried changing the lines MartyG suggested?
Regards,
-Yermi
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page