- 신규로 표시
- 북마크
- 구독
- 소거
- RSS 피드 구독
- 강조
- 인쇄
- 부적절한 컨텐트 신고
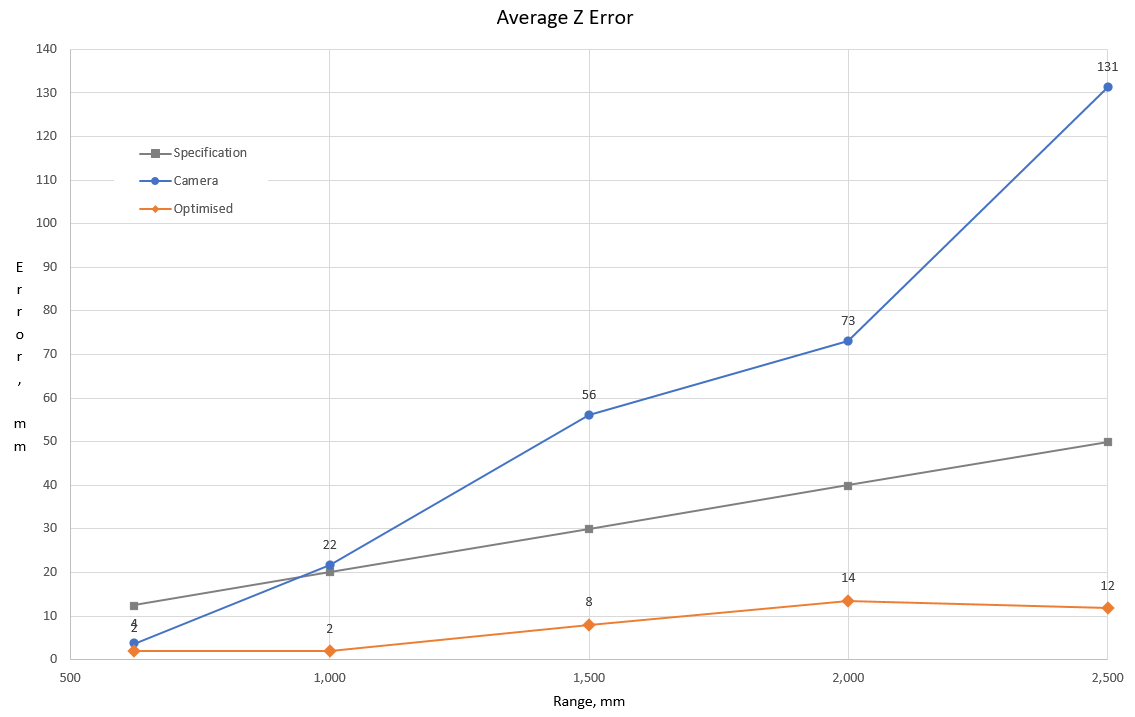
The accuracy of depth maps can be greatly improved by calibrating all the intrinsic and extrinsic parameters, along with non-linearity correction as a single problem.
Here is the accuracy of an out-of-the-box D435 compared to the results after optimisation:
The original quadratic error becomes almost linear in the depth, an order of magnitude better at 2.5 metres.
The VS2017 solution is open-sourced, Apache 2.0 on GitHub https://github.com/smirkingman/RealSense-Calibrator https://github.com/smirkingman/RealSense-Calibrator.
As I own only a pair of D435s, I would be very grateful if those with other cameras could let me know if they achieve similar results.
Thanks,
{kind=link}
{kind=link}
링크가 복사됨
- 신규로 표시
- 북마크
- 구독
- 소거
- RSS 피드 구독
- 강조
- 인쇄
- 부적절한 컨텐트 신고
Looks great! Thanks so much for your hard work.
Could you post this on the RealSense GitHub too please so the RealSense developers and engineers there can evaluate it?
https://github.com/IntelRealSense/librealsense/issues Issues · IntelRealSense/librealsense · GitHub
You may also like to consider submitting a 'pull request' for your project to be integrated into the SDK. This is optional but would be welcomed.
https://github.com/IntelRealSense/librealsense/blob/master/CONTRIBUTING.md librealsense/CONTRIBUTING.md at master · IntelRealSense/librealsense · GitHub
{kind=link}