- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello!
I've so far managed to train my own images, produce a model, convert it to bin/xml format and deploy it on RPi with stick2.
I'm now trying to incorporate a relatively simple servo motor library into OpenVino and am having trouble finding which makefile to edit and what to type into it. I mapped out the directorty structure for OpenVino and it looks very complicated with lots of duplicates. I found the main.cpp file for the object_detection_demo_ssd_async sample and managed to make simple edits, but not getting the servo library found properly during compile.
The servo library is pca9685 and controls a hat sitting on the Pi through I2C bus. Works fine on it's own, but not with OpenVino.
Here's a rough diagram of the directory structures: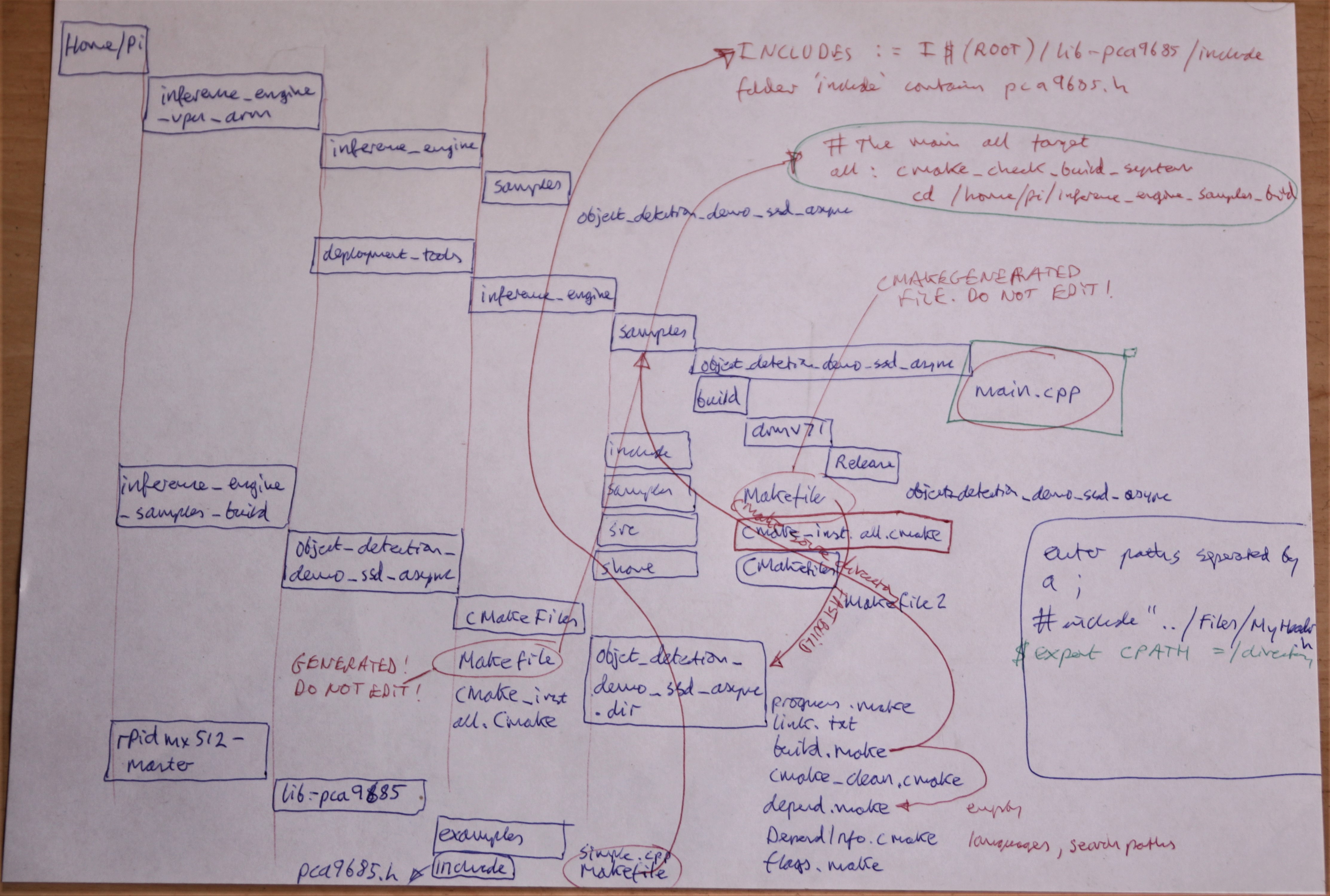
If somebody knows how the cmake system works in OpenVino .... please help! ...... Thanks
Link Copied
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page