- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
{kind=link}
Link copiato
- « Precedente
-
- 1
- 2
- Successivo »
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Advanced stream programming is not my field of expertise, so I will link stream expert jb455 into this discussion to bring it to his attention. In the meantime, the most compatible source of existing knowledge i could find that related to your question is in the link below. I hope it can provide some useful insight.
https://software.intel.com/en-us/forums/realsense/topic/596423 Cannot get Device Instance
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Thank you I follow the instruction but can't do it.
You know how to add # include "util_cmdline.h" in visual studio?
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
I do not develop in Visual Studio sadly, as I am a Unity game engine specialist. I would ask though if you are using Visual Studio C++. This is because C# scripts do not need includes in the header section of the script.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Do you have any projection example code with C# ? Also, can you pointer your C# blogs or relative good explanation blogs or sources? Using realSense sdk is not easy. How to match c++ sdk definition with C# ? is it almost same? From the example I don't get how to use api's with it.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Yes, it is hard to get started. I've been using it for about a year and a half now; there was much less help about when I was learning so I just had to work it out by myself mostly! There were some very helpful people on the old forum too. You can mostly piece it together by going through https://software.intel.com/sites/landingpage/realsense/camera-sdk/v1.1/documentation/html/index.html?doc_devguide_introduction.html the documentation and looking at the C++ sample but it does take time. As I said, if you're stuck with how to use a particular method in the projection api, search the forum for the method name and with any luck it'll be one someone has already asked about and had it explained. If not, feel free to post another question (ideally in a new thread to make it easier for future people to find) and hopefully someone will be able to help you.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Thanks for the mention of the Unity guides, JB.
Spk921, here's the link to the index of guides if you haven't found it yet.
https://software.intel.com/en-us/forums/realsense/topic/676139 Index of Marty G's RealSense Unity How-To Guides
It's a very useful link to bookmark because you can also use it as a launching pad for searches of the old RealSense forum with the 'Powered by Google' search box, as a lot of valuable information is archived on that former forum.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Thank you this is really helpful.
However, where can I find sample source code that are listed in Unity Application and your posts?
https://software.intel.com/sites/landingpage/realsense/camera-sdk/v1.1/documentation/html/index.html?samples_toolkit.html Intel® RealSense™ SDK 2016 R2 Documentation
Your posts says about how to use Unity but I need how to bind with realSense
For example here https://software.intel.com/en-us/forums/realsense/topic/556743 Unity tip: Controlling Avatar Arms And Legs With A Single RealSense Camera
help using Unity but don't know how to get "hand detected" icon. It seems that it need some script to add component.
But there are no explain how to right code with realSense SDK.
Anyway, thank you for leading me. I will take a look in depth.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
The R2 SDK comes with a program called the Unity Toolkit. If you run it whilst you have a project open in Unity then it imports the RealSense camera library files and tools into that project. These tools include a folder of pre-made 'Action' scripts for purposes such as hand / face / object tracking and triggering actions that you can just drop into a Unity object without having to do script programming.
The pre-made script that can be used like the example mentioned to control objects such as an avatars arms and legs, is called TrackingAction.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Does the camera streaming work without the device/projection stuff? If not, it may be a driver/hardware issue.
One thing which may help is looking at the samples to see how they populate the device selection drop down menu, then how they get it to use that device (instead of another one if you have multiple plugged in). That way, you'll definitely know that the device is available before starting to stream with it.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
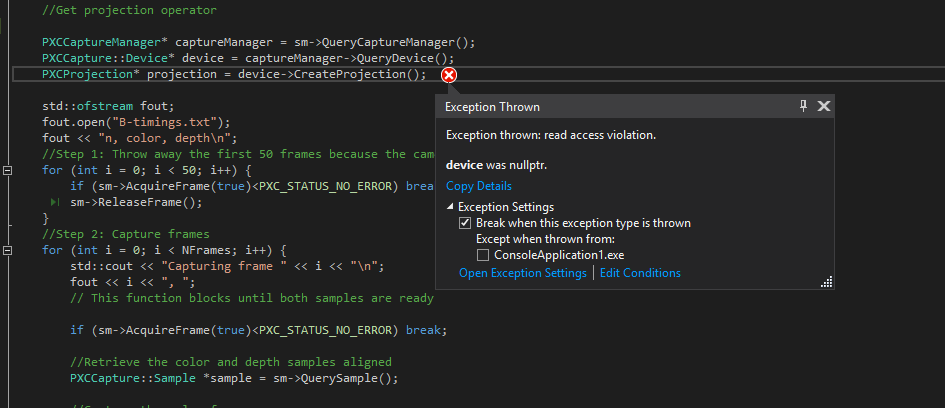
Thank you. I take a looked but it is over complicated.
PXCCaptureManager *cm = sm->QueryCaptureManager();PXCCapture::Device *cp = cm->QueryDevice();PXCProjection* projection = cp->CreateProjection();
How can I get device with above code?
Why I can't access to the device?
I can get depth and color frames without device pointer but need to get UV map to match color and depth images.
Because two cameras are depart from it. Thanks.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Before those 3 lines, you use sm->EnableStreams(..) and sm->Init(), right? I think it's at the Init() point that it chooses the device and enables it, so you won't be able to query the device before that. Does it work if you do sm->captureManager->device->CreateProjection(); ?
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
# include
# include "RealSense/SenseManager.h"
# include "RealSense/SampleReader.h"
# include "pxcsensemanager.h"
# include "pxcprojection.h"
# include "pxcmetadata.h"
# include "pxcsession.h"
# include "pxccapture.h"
//# include "util_cmdline.h"
//# include "util_render.h"
# include
# include
# include
# include
# include
# include
//Code adapted from the Kinect v2 samples
HRESULT SaveBitmapToFile(BYTE* pBitmapBits, LONG lWidth, LONG lHeight, WORD wBitsPerPixel, LPCWSTR lpszFilePath)
{
DWORD dwByteCount = lWidth * lHeight * (wBitsPerPixel / 8);
BITMAPINFOHEADER bmpInfoHeader = { 0 };
bmpInfoHeader.biSize = sizeof(BITMAPINFOHEADER); // Size of the header
bmpInfoHeader.biBitCount = wBitsPerPixel; // Bit count
bmpInfoHeader.biCompression = BI_RGB; // Standard RGB, no compression
bmpInfoHeader.biWidth = lWidth; // Width in pixels
bmpInfoHeader.biHeight = -lHeight; // Height in pixels, negative indicates it's stored right-side-up
bmpInfoHeader.biPlanes = 1; // Default
bmpInfoHeader.biSizeImage = dwByteCount; // Image size in bytes
BITMAPFILEHEADER bfh = { 0 };
bfh.bfType = 0x4D42; // 'M''B', indicates bitmap
bfh.bfOffBits = bmpInfoHeader.biSize + sizeof(BITMAPFILEHEADER); // Offset to the start of pixel data
bfh.bfSize = bfh.bfOffBits + bmpInfoHeader.biSizeImage; // Size of image + headers
// Create the file on disk to write to
HANDLE hFile = CreateFileW(lpszFilePath, GENERIC_WRITE, 0, NULL, CREATE_ALWAYS, FILE_ATTRIBUTE_NORMAL, NULL);
// Return if error opening file
if (NULL == hFile)
{
return E_ACCESSDENIED;
}
DWORD dwBytesWritten = 0;
// Write the bitmap file header
if (!WriteFile(hFile, &bfh, sizeof(bfh), &dwBytesWritten, NULL))
{
CloseHandle(hFile);
return E_FAIL;
}
// Write the bitmap info header
if (!WriteFile(hFile, &bmpInfoHeader, sizeof(bmpInfoHeader), &dwBytesWritten, NULL))
{
CloseHandle(hFile);
return E_FAIL;
}
// Write the RGB Data
if (!WriteFile(hFile, pBitmapBits, bmpInfoHeader.biSizeImage, &dwBytesWritten, NULL))
{
CloseHandle(hFile);
return E_FAIL;
}
// Close the file
CloseHandle(hFile);
return S_OK;
}
int wmain(int argc, WCHAR* argv[]) {
int NFrames = 400;
if (argc > 1) {
NFrames = _wtoi(argv[1]);
}
std::cout << "Capturing " << NFrames << " frames";
int width = 320, height = 240;
BYTE* colorFrames = new BYTE[NFrames*width*height * 3];
float* depthFrames = new float[NFrames*width*height];
PXCPointF32* UVMaps = new PXCPointF32[NFrames*width*height];
PXCSenseManager* sm = PXCSenseManager::CreateInstance();
PXCSession* session = sm->QuerySession();
// Select the color and depth streams
sm->EnableStream(PXCCapture::STREAM_TYPE_COLOR, width, height, 60.0f);
sm->EnableStream(PXCCapture::STREAM_TYPE_DEPTH, width, height, 60.0f);
// Initialize and Stream Samples
sm->Init();
//Get projection operator
PXCCaptureManager *cm = sm->QueryCaptureManager();
PXCCapture::Device *cp = cm->QueryDevice();
PXCProjection* projection = cp->CreateProjection();
std::ofstream fout;
fout.open("B-timings.txt");
fout << "n, color, depth\n";
//Step 1: Throw away the first 50 frames because the camera seems to be warming up
for (int i = 0; i < 50; i++) {
if (sm->AcquireFrame(true)
sm->ReleaseFrame();
}
//Step 2: Capture frames
for (int i = 0; i < NFrames; i++) {
std::cout << "Capturing frame " << i << "\n";
fout << i << ", ";
// This function blocks until both samples are ready
if (sm->AcquireFrame(true)
//Retrieve the color and depth samples aligned
PXCCapture::Sample *sample = sm->QuerySample();
//Capture the color frame
PXCImage* c = sample->color;
pxcI64 ctimestamp = c->QueryTimeStamp();
fout << ctimestamp << ", ";
PXCImage::ImageData imageData;
c->AcquireAccess(PXCImage::ACCESS_READ, PXCImage::PIXEL_FORMAT_RGB24, &imageData);
memcpy(&colorFrames[i*width*height * 3], imageData.planes[0], sizeof(BYTE)*width*height * 3);
c->ReleaseAccess(&imageData);
//Capture the depth frame
PXCImage* d = sample->depth;
pxcI64 dtimestamp = d->QueryTimeStamp();
fout << dtimestamp << "\n";
PXCImage::ImageData depthData;
d->AcquireAccess(PXCImage::ACCESS_READ, PXCImage::PIXEL_FORMAT_DEPTH_F32, &depthData);
memcpy(&depthFrames[i*width*height], depthDat...
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
This is the code which I am using it. Yes I did after init()
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Hm, the only thing I have different to you is I use device = sm.captureManager.QueryDevice(); - does that make any difference?
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
I can't do "DOT" since it's a pointer. Can you share your code that should be faster.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Also what should I set visual studio setting to use
//# include "util_cmdline.h"
//# include "util_render.h"
this headers?
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Sorry, I'm using C# so you'll have to change it to C++ syntax. device = sm->captureManager->QueryDevice(); is it?
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
Yes C# should be better! For me because I would like to use it for Unity Binding. I was not able to see proper function app definition from C# so I was planning to do CPP and convert to .dll. Can you send it by e-mail? mailto:spkim921@gmail.com spkim921@gmail.com.
Also, it should be helpful if you could point out C# example code. It is really lack of information just looking at realSense example since it has only one.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
There are a few C# (WinForms) samples included in the SDK, though unfortunately none of them use projections You can use the RawStreams sample as a base to get basic stuff working then use the docs/modify the C++ projections sample to go from there. My company doesn't allow sharing all my code but I have posted a few snippets showing how to do various things over the years - just search for the method name you're struggling with in the forum and you may find something to help (I did put a lot in the old forum too but that's hard to access now).
If you're doing it in unity C# , MartyG has created a series of guides to help people get started - search in the forum for that too.
- Contrassegnare come Nuovo
- Preferito
- Iscriversi
- Disattiva notifiche
- Iscriversi a feed RSS
- Evidenziare
- Stampare
- Segnalare contenuto inappropriato
- Iscriversi a feed RSS
- Contrassegnare la discussione come nuova
- Contrassegnare la discussione come letta
- Sposta questo Discussione per l'utente corrente
- Preferito
- Iscriversi
- Pagina in versione di stampa
- « Precedente
-
- 1
- 2
- Successivo »