- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I am using SR300 camera on ROS Indigo, Ubuntu 14.04. The question is I can not find any kind of SDK fit my environment. Could someone help me?
Also, I have no idea how to use it to calculate the depth and do object tracking work, could anyone give me some suggestions or give me some tutorials?
Thanks a lot.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
First, I will reprint the guide I linked you to in another message for launching RealSense with ROS in an RVIZ environment, as the original message was too old for the forum to display the update on the forum's front page and others may benefit from it.
https://robolady.wordpress.com/2016/11/27/running-intel-realsense-r200-ros-nodelet-and-rviz/ Running Intel RealSense R200 ROS nodelet and RViz – Robotics. And other stuff too.
I'll also link back to your other message to help other people who are reading this and may wish to offer advice.
Regarding your question here: if you are using Ubuntu with an SR300 then Librealsense - which you said that you have already successfully installed in your other message - would be the correct choice.
As you are new to the SR300 and ROS, rather than diving straight into the deep end with depth sensing, I would recommend trying the Librealsense example program cpp-capture first. This displays four boxes on your screen with RGB, depth and IR streams in them.
https://github.com/IntelRealSense/librealsense/blob/master/examples/cpp-capture.cpp librealsense/cpp-capture.cpp at master · IntelRealSense/librealsense · GitHub
You can generate pre-built 'binary' versions of the samples that can be run. Although I have not tried it myself, the process is apparently to:
1. Navigate to the root folder of Librealsense
2. Use this instruction:
make && sudo make install
3. You should then be able to find the demos, samples and tests in the folder called /usr / local / bin
Link Copied
- « Previous
-
- 1
- 2
- Next »
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi MartyG,
Do you know the patch script of SR300? How to re-run the script? Because I think why the method you told me failed may because I did not do it in the right way.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
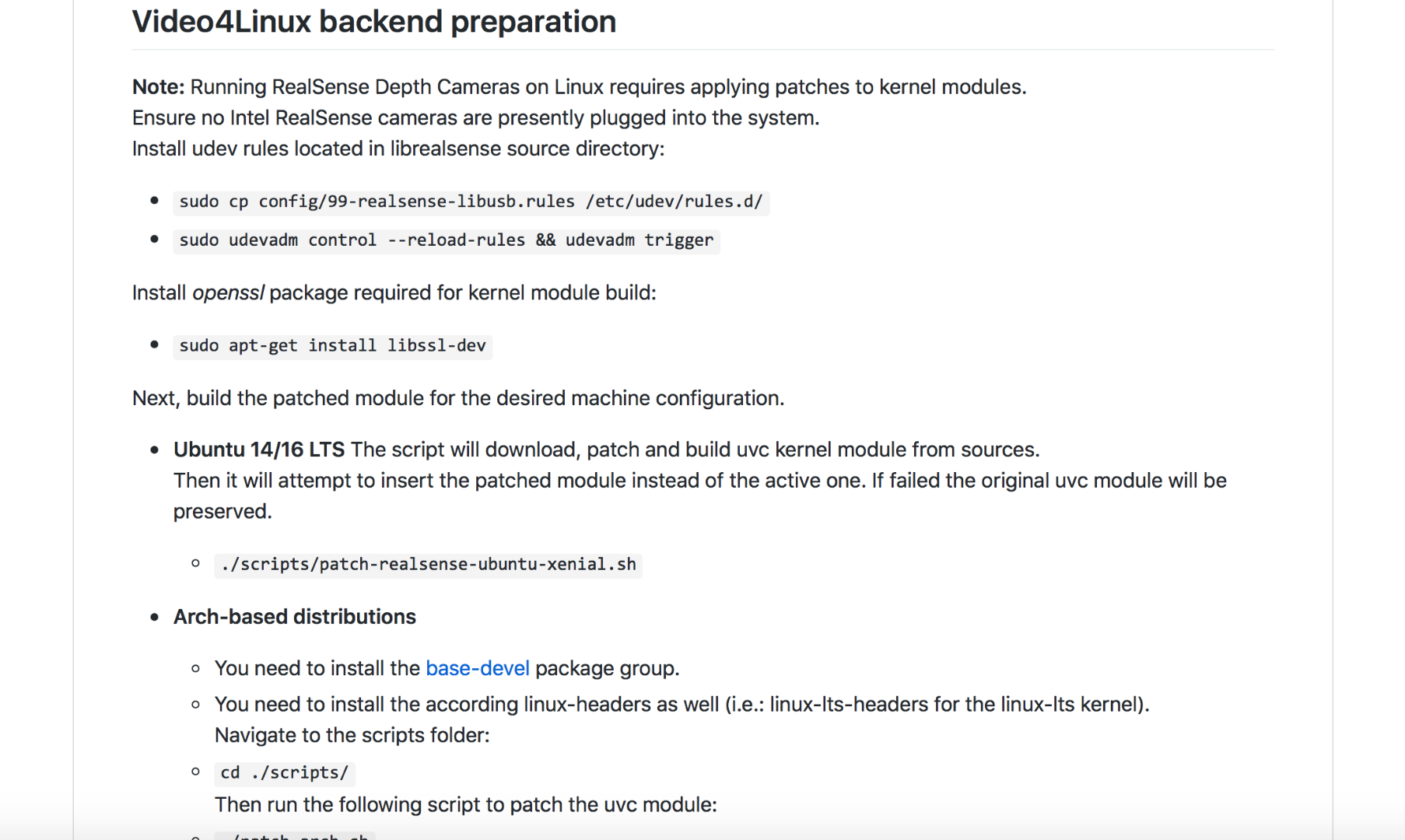
And in fact, I do the re-running work based on the instruction on Github as shown in the attached screenshot, then run "sudo modprobe uvcvideo".
Am I do right?
By the way, the camera can still capture depth image and only cannot work on RGB image.
{kind=link}
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I have not performed the patching process myself because I am a Windows user. So the instructions that you linked to describe the patching process better than I can. It seems like the instructions that you should enter to do patching should be followed in this strict order:
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
sudo apt-get install libssl-dev
*********
The final step is to build the patched module. This is done on Ubuntu using the script below. Ignore the bit of the instructions that says ' Arch-based distributions', as that is for Arch Linux users and not Ubuntu.
./scripts/patch-realsense-ubuntu-xenial.sh
*********
Once the script has been run, you can use the instruction below to check the logs to see if a new uvcvideo driver has been registered.
sudo dmesg | tail -n 50
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Thanks MartyG.
It seems I have done just what you said, but it did not fix the green screen problem. Any more suggestions? If it is a hardware problem, do you know how to repair it? Since I am in Singapore, should I send it back to Intel in US to check it out which part is broken?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
There is not an official Intel service for repairing the camera. Although parts for it can be ordered from an Intel Authorized Distributor company, it would probably cost more to get a local repair-shop in Singapore to fix it than the cost of a new camera. You should return it to the place that you purchased it from. If you bought it online from the Intel Click store, return it to Click. If you bought it from another retailer, it has to be returned to them and not Intel.
If the camera was bought from Intel Click or from an Intel Authorized Distributor company, you have 90 days after the date of purchase to file a claim to return the camera for a refund or replacement.
https://www.intel.me/content/www/xr/en/support/emerging-technologies/intel-realsense-technology/000023505.html Refund Process for Intel® RealSense™ Developer Kits
Please bear in mind that the SR300 is being retired this month, so if you need a replacement SR300 then you should start the returns process now before SR300 stocks run out. Otherwise your only SR300 option will be to purchase an SR300-compatible camera such as the Razer Stargazer or Creative BlasterX Senz3D.
Before you do a return though, there was something else you could try with the camera other than patching. I went back to the start of this conversation and was reminded that you were using Rviz. There are commands you can use with Rviz to check the color and depth streams.
For color stream
rosrun image_view image_view image:=/camera/color/image_raw
For depth stream
rosrun image_view image_view image:=/camera/depth/image_raw
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
I have tried the rosrun command you offered but still can only see green noise image.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
There were some reports of green RGB streams occurring after the firmware on the camera was updated, so the advice was given to try downgrading to an earlier version of the firmware. This is usually done by running an earlier version of the Depth Camera Manager program in Windows. I do not know of a way to change the firmware in Ubuntu though. So this option may not be possible if you do not have a Windows PC that you can connect the camera to.
If multiple different programs are not displaying the RGB image then this increases the likelihood that the problem is with the camera hardware rather than being a software problem.
Edit: I noticed that in the title of your discussion, you stated you were using Ubuntu 14.04. This can cause some issues with SR300 in Linux, as Librealsense automatically patches the R200 camera model but not the SR300, so you have to apply patches manually for the SR300 camera. A reason given for this by a Librealsense leader was that SR300 has a different firmware and USB setup to the R200 and ZR300 cameras.
My research indicates that the ideal setup for the SR300 is to use Ubuntu 16.04 LTS, with at least Kernel 4.4, and run this patch script for the SR300 to get the files that are automatically upstreamed on R200 and ZR300 cameras
./scripts/patch-uvcvideo-16.04.simple.sh
************************************
Ubuntu 16.04 LTS:
http://releases.ubuntu.com/16.04/ Ubuntu 16.04.3 LTS (Xenial Xerus)
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page
- « Previous
-
- 1
- 2
- Next »