- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hello,
I'm trying out the blob tracking algorithm using the R200 RealSense, I followed the steps in the manual and looked at how the sample in the SDK uses the algorithm to get the blobs but I can't seem to get it right. I don't think I got my image right, does anyone have any suggestions? Or in that matter have an simple example using the blob tracking in c++ I could look at to get an idea of what I'm doing wrong. It's for a school project, I'm doing a system that could help the visually impaired detect objects with all Intel technology. Also I'm not a computer science mayor so sorry if my code is messy.
Thank you!
Sofía G.
#include <Windows.h>
#include <iostream>
#include <wchar.h>
#include <stdio.h>
#include <stdlib.h>
#include "pxcsensemanager.h"
#include "pxccapture.h"
#include "pxcvideomodule.h"
#include "utilities/pxcmaskutils.h"
#include "pxcblobmodule.h"
#include "pxcblobconfiguration.h"
#include "pxcblobdata.h"
#include "pxcsession.h"
#include "pxccapture.h"
#include "util_cmdline.h"
#include "util_render.h"
#include <conio.h>
#define NFRAMES 500
int maxBlobToShow;
int wmain(int argc, WCHAR* argv[]) {
wprintf_s(L"Hello, World!\n");
PXCSenseManager *session = PXCSenseManager::CreateInstance();
if (!session) {
wprintf_s(L"Unable to create the PXCSenseManager\n");
return 3;
}
wprintf_s(L"Creating Session\n");
//get capture manager instance if file record is set to true (m_brecord)
PXCCaptureManager *captureManager = session->QueryCaptureManager();
//BLOB DATA CODE & CONFIGURATION
session->EnableBlob(0);
PXCBlobModule*blobModule = session->QueryBlob();
PXCBlobData*blobData=blobModule->CreateOutput();
maxBlobToShow = 4;
int numOfBlobs = blobData->QueryNumberOfBlobs();
if (maxBlobToShow>numOfBlobs)
{
maxBlobToShow = numOfBlobs;
}
PXCBlobData::AccessOrderType accessOrder = PXCBlobData::ACCESS_ORDER_NEAR_TO_FAR;
UtilRender renderc(L"Color");
UtilRender renderd(L"Depth");
pxcStatus status;
PXCVideoModule::DataDesc streams = {};
if (captureManager->QueryCapture()) {
captureManager->QueryCapture()->QueryDeviceInfo(0, &streams.deviceInfo);
}
else {
streams.deviceInfo.streams = PXCCapture::STREAM_TYPE_COLOR | PXCCapture::STREAM_TYPE_DEPTH;
streams.deviceInfo.streams = PXCCapture::STREAM_TYPE_DEPTH;
}
session->EnableStreams(&streams);
//initialize pipeline
status = session->Init();
if (status < PXC_STATUS_NO_ERROR) {
wprintf_s(L"Failed to locate any video stream(s)\n");
session->Release();
return status;
}
wprintf_s(L"Streaming Data\n");
//stream data
for (int nframes = 0; nframes < NFRAMES; nframes++) {
//wait until new frame is availaible and locks it
status = session->AcquireFrame(false);
if (status < PXC_STATUS_NO_ERROR) {
if (status == PXC_STATUS_STREAM_CONFIG_CHANGED) {
wprintf_s(L"Stream Config changed. Reinitializing\n");
session->Close();
}
break;
}
wprintf_s(L"Rendering Streams\n");
//Render streams
const PXCCapture::Sample *sample = session->QuerySample();
if (sample) {
if (sample->depth && !renderd.RenderFrame(sample->depth)) break;
if (sample->color && !renderc.RenderFrame(sample->color)) break;
}
// BLOB EXTRACTION TO IMAGE
pxcI32 iBlobsNum = blobData->QueryNumberOfBlobs();
for (int i = 0; i < iBlobsNum; i++) {
PXCBlobData::IBlob * pBlob = NULL;
//blobData->QueryBlob(); THIS LINE DOESN'T SEEM TO WORK, SHOULD I ADD THE PXCBLOBEXTRACTION??
// handle extracted blob data
pxcI32 nContours = pBlob->QueryNumberOfContours();
}
// IMAGE PROCESSING USING PIXEL DATA IN THE IMAGE TO FIND OBJECTS AND LOCATE THEM EITHER IN THE RIGHT,CENTER, OR LEFT POSITION OF THE IMAGE. STILL IN DEVELOPMENT IF YOU HAVE ANY SUGGESTIONS I WOULD APPRECIATE THEM
//release frame
session->ReleaseFrame();
wprintf_s(L"To quit press e\n");
//check for keystroke press
if (_kbhit()) {
int key = _getch() & 255;
if (key == 27 || key == 'q' || key == 'Q') {
break;
}
}
if (nframes=499){
nframes = 0;
}
} while (status == PXC_STATUS_STREAM_CONFIG_CHANGED);
wprintf_s(L"Exiting");
blobData->Release();
return 0;
session->Release();
return 0;
system("pause");
return 0;
}
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
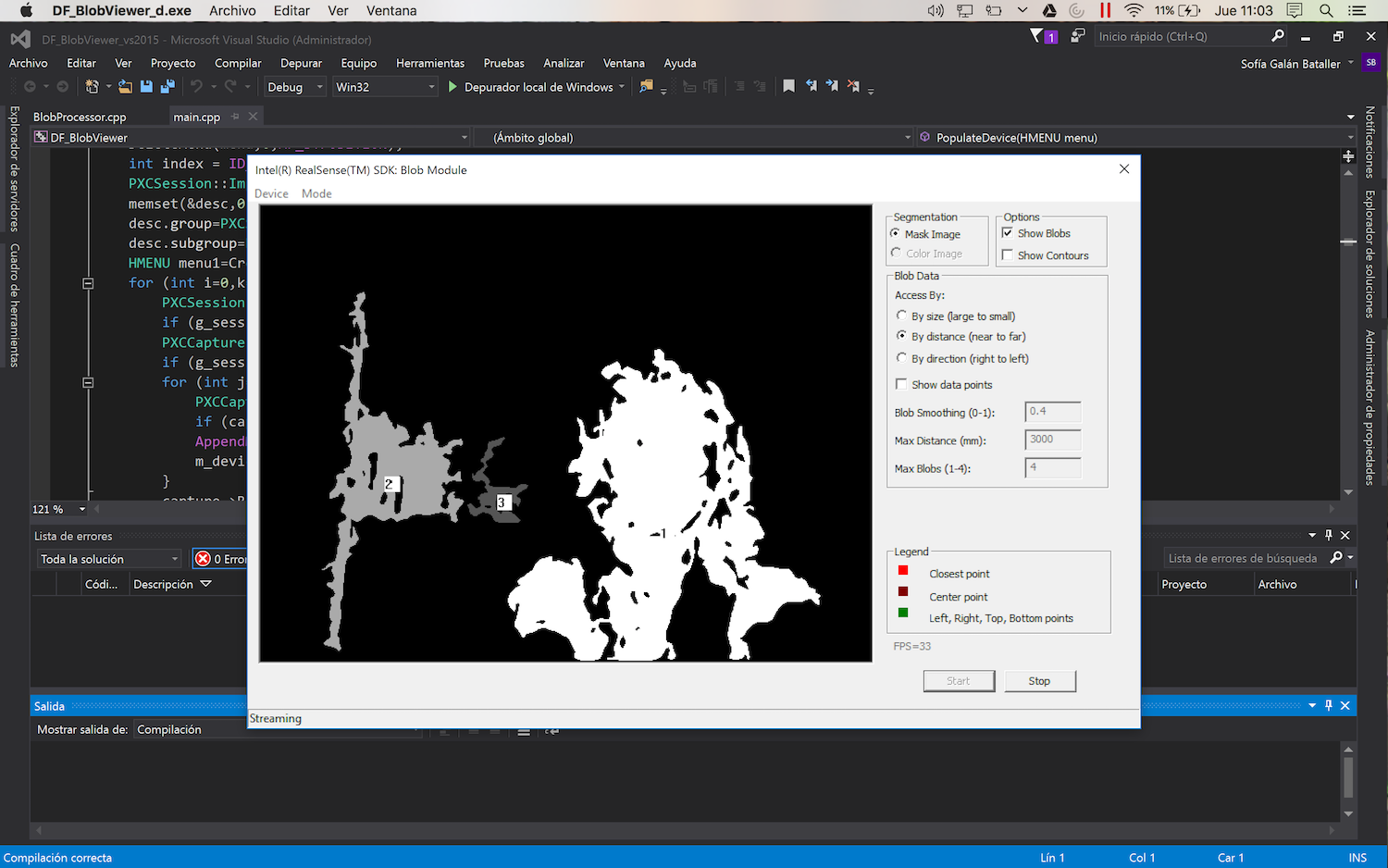
Have you looked at our sample code @C:\Program Files (x86)\Intel\RSSDK\sample\DF_BlobViewer? What the image did you get? Thanks!
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
David Lu (Intel) wrote:
Have you looked at our sample code @C:\Program Files (x86)\Intel\RSSDK\sample\DF_BlobViewer? What the image did you get? Thanks!
Yes I have tried the sample for the BlobViewer and I got the image attached:
Thank you so much!
Sofia G.
#include <Windows.h>
#include "pxcsensemanager.h"
#include "pxcblobmodule.h"
#include "util_cmdline.h"
#include "util_render.h"
#include <conio.h>
#include <inttypes.h>
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int maxBlobToShow;
int main(int argc, char* argv[]) {
wprintf_s(L"Prueba RealSense\n");
pxcStatus sts;
PXCSenseManager *psm = 0;
psm = PXCSenseManager::CreateInstance();
if (!psm) {
wprintf_s(L"Unable to create the PXCSenseManager\n");
return 1;
}
wprintf_s(L"Creando Session\n");
//get capture manager instance if file record is set to true (m_brecord)
PXCCaptureManager *captureManager = psm->QueryCaptureManager();
//BLOB DATA
sts = psm->EnableBlob(0);
if (sts < PXC_STATUS_NO_ERROR) {
wprintf_s(L"Unable to enable Blob Analysis \n");
return 2;
}
PXCBlobModule*blobAnalyzer = psm->QueryBlob();
if (!psm) {
return 3;
}
PXCVideoModule::DataDesc streams = {};
if (captureManager->QueryCapture()) {
captureManager->QueryCapture()->QueryDeviceInfo(0, &streams.deviceInfo);
}
else {
streams.deviceInfo.streams = PXCCapture::STREAM_TYPE_COLOR | PXCCapture::STREAM_TYPE_DEPTH;
streams.deviceInfo.streams = PXCCapture::STREAM_TYPE_DEPTH;
}
psm->EnableStreams(&streams);
//initialize pipeline
sts = psm->Init();
if (sts < PXC_STATUS_NO_ERROR) {
wprintf_s(L"Failed to locate any video stream(s)\n");
psm->Release();
return sts;
}
PXCBlobData*outputBlob = blobAnalyzer->CreateOutput();
PXCBlobConfiguration*configblob = blobAnalyzer->CreateActiveConfiguration();
configblob->SetMaxBlobs(pxcI32(4));
configblob->SetBlobSmoothing(pxcI32(0.4));
configblob->ApplyChanges();
PXCBlobData::AccessOrderType accessOrder = PXCBlobData::ACCESS_ORDER_NEAR_TO_FAR;
UtilRender renderc(L"Color");
UtilRender renderd(L"Depth");
wprintf_s(L"Streaming Data\n");
wprintf_s(L"To quit press 'ESC' or 'Q'\n");
//stream data
bool keepRunning = true;
while (keepRunning) {
outputBlob->Update();
//wait until new frame is availaible and locks it
sts = psm->AcquireFrame(); // decia false
if (sts < PXC_STATUS_NO_ERROR) {
if (sts == PXC_STATUS_STREAM_CONFIG_CHANGED) {
wprintf_s(L"Stream Config changed. Reinitializing\n");
psm->Close();
}
break;
}
//Render streams
const PXCCapture::Sample *sample = psm->QuerySample();
if (sample) {
if (sample->depth && !renderd.RenderFrame(sample->depth)) break;
if (sample->color && !renderc.RenderFrame(sample->color)) break;
}
// BLOB------------------------------
pxcI32 numOfBlobs = outputBlob->QueryNumberOfBlobs();
cout << numOfBlobs << endl;
psm->ReleaseFrame();
//check for keystroke press
if (_kbhit()) {
int key = _getch() & 255;
if (key == 27 || key == 'q' || key == 'Q') {
break;
}
}
} while (sts == PXC_STATUS_STREAM_CONFIG_CHANGED);
wprintf_s(L"Exiting");
psm->Release();
return 0;
}
{kind=link}
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page