- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Assume I want to detect a particular plane really well, minimizing the depth error. It has been mentioned that textured objects produce better depth map than untextured ones, except for the cases with a repetitive pattern, which confuses the algorithm and produces hallucinations. If I can print anything on the plane to improve detection, what kind of texture would be the best?
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
The IR projector of the camera can project a pattern of random dots onto an object and add analyzable texture to a scene in areas where depth may be lacking (doors, walls, etc).
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
What particular characteristics make the IR pattern "analyzable" and how the hallucinations from repetitiveness are mitigated?
"The 400 Series cameras perform even better in strong light, and texture detail is increased by that light. So in strong light, the camera should not need the dot pattern to provide texture."
Assume the room is brightly-lit so the IR pattern is not very visible. But the plane can have any texture printed on it. What kind of texture is "well analyzable" by the camera?
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Intel has a pre-made texture pattern set you can download as a zip, print and attach to a flat surface as an alternative to using dot projection.
https://realsense.intel.com/wp-content/uploads/sites/63/texture-pattern-set.zip https://realsense.intel.com/wp-content/uploads/sites/63/texture-pattern-set.zip
-
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Great! Do you know any places where I could read about the principles of generating such patterns? Like point distributions and such.
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
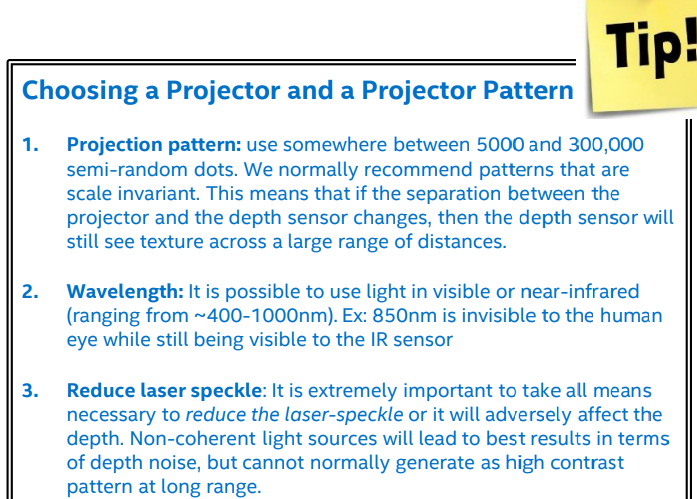
A key principle of such patterns is that they can show texture at many different scales, so that the detail remains readable over a large range of distances. These patterns are called 'scale invariant'.
Intel's illustrated camera tuning guide has the following advice.
You can read the full guide here:
https://realsense.intel.com/wp-content/uploads/sites/63/BKM-For-Tuning-D435-and-D415-Cameras-Webinar_Rev3.pdf https://realsense.intel.com/wp-content/uploads/sites/63/BKM-For-Tuning-D435-and-D415-Cameras-Webinar_Rev3.pdf
{kind=link}
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page