- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
Hi everyone. I recently received my R200 and have successfully installed the SDK and able to view the camera working using the included utility apps. I can confirm the RGB and depth cameras work perfectly well.
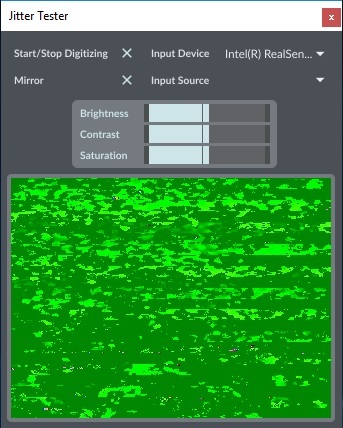
I am needing to utilise these camera feeds directly into Max MSP for some prototyping, and whilst I can stream the RGB feed as expected, the depth camera outputs blocky green vision instead, as opposed to the black and white images we would expect.
Link Copied
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report Inappropriate Content
This seems to be relating to the DCM driver. Though I am unable to find a solution. I have attempted clean installs of older versions of the driver without much luck. Please see below for what I am experiencing.
Would Librealsense be a potential other solution? Would it function in a similar way to the DCM Drivers?
Any other thoughts would be appreciated :)
Best regards,
Matt
{kind=link}
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page